
Řídící jednotka pro peletový kotel
Úvodní stránka › Fórum › Vaše projekty › Arduino › Řídící jednotka pro peletový kotel
- Toto téma obsahuje celkem 112 odpovědí. Do diskuze (6 diskutujících) se naposledy zapojil uživatel
johnyhol a poslední změna proběhla před 9 roky a 2 měsíci.
-
AutorPříspěvky
-
5.11.2016 v 23:53 #9098
posjirka
Účastníkproblém je v tom, že je tu použit tzv. watchog. ten je nastaven na určitý čas (8s což je jeho maximum). když se nezresetuje včas watchdog a přeteče tak se resetuje celý procesor. To je ta halvní výhoda celéhe řešneí. Když se někde kousne procesor tak se sám resetuje a pokračuje dál . Je to odpově´d na otázku, proč nejde nastavit čas delší než 8s.
1. nepoužívej čas delší než 4-5s ať máš nějákou rezervu.
2. Pro delší čas použij více postupných pauz:delay(3000); wdt_reset(); // resetuj watchdog delay(3000); wdt_reset(); // resetuj watchdog delay(4000); wdt_reset(); // resetuj watchdogcelý kod je řešen opravdu primitivně. Tak jsem ho i bral aby s ena něm dalo dobře naučit jak co funguje. I proto jen jej rozdělil na funkce, které jsou zkoumat postupně. Mrkni na to a kdybys něco nepobíral, tak určitě napovíme ….
6.11.2016 v 12:03 #9099johnyhol
ÚčastníkTakže pokud to dobře chápu, tak je těch max. 8s na watchdogu nastaveno už někde v knihovně a proto nejde v programu nastavit víc? Zkoušel jsem právě na něm (ve void setup) nastavit víc a už to hlásilo chybu.
Ještě k bodu 2., ten kód co navrhuješ, ten musím napsat všude (do každý funkce: void loop, void zapalovaciDavkaPelet atd.) kde je watchdog použitý?A celkový čas by měl být delší než maximální čas funkce? (např. když bude pauza dávkování 10s tak součet časů watchdogu musí být 11s a víc?)Díky moc za rady!
6.11.2016 v 14:28 #9100Účastníkten watchdog je ochranná funkce … jak jsem již psal …
celá funkce watchdog se skládá z:– vložení knihovny:
#include <avr/wdt.h>
– aktivace watchdogu v setupu :wdt_enable(WDTO_8S);
– průběžný reset :wdt_reset();a 8s je pro něj maximum:
https://tushev.org/articles/arduino/5/arduino-and-watchdog-timer
add.2. – ano ten kod musíš napsat všude, kde bude čas delší než 8s. Radši méně, když máš pak víc funkcí nemusel by uplně všechno včas stíhat a omylem by se procesor sám resetoval.když chceš pauzu 10s tak jí rozděl na 2x 5s a pokaždé resetuj watchdog….
u 15s to rozděl na 3x 5s a opět pokaždé resetuj watchdog …6.11.2016 v 16:38 #9101ÚčastníkTak jsem zkoušel cvičně změnit čas u pauzy dávkování na 1x 5s (myslel jsem, že když to bude fungovat tak že to rozdělím jak radíš na 2x 5s) a stejně to nejde. Funguje to pouze s pauzou 1s. Zkoušel jsem i 2s a to už taky nešlo. Tak nevím jestli jsem tě dobře pochopil, nebo je chyba ještě jinde.
6.11.2016 v 18:18 #9115Účastníkco to znamená, že to nejde ? Nevím co měníš … hoď sem kod …
6.11.2016 v 18:49 #9124Účastník// REGULACE PELETKOVEHO KOTLE // author. Johnyhol & by JP // v 14_5_2016 // changelog // v 5_11_2016 // zmena casu - upraveno pro realny provoz // v 4_11_2016 // zmena vsech vystupu na rele // v 14_5_2016 // precislovani pinu // zmena funkce fotobunky z digitalu na analog // dolpneni seriove komunikace o hodnotu fotobunky // v 30_3_2016 // oprava funkce tlacitka kvitace poruchy -> HIGH->LOW // umazani parametru "long cas=13000;" -> jiz neni potreba // umazani parametru "//delay(84000); //pockej 84s" u funkce dohoreni -> jiz neni potreba // umazani parametru "//delay(12000); //po dobu 12s" u funkce davkovani zapalovaci davky pelet -> jiz neni potreba // umazani parametru "//if(digitalRead(prostorovyTermostat) == LOW || digitalRead(kotlovyTermostat) == LOW){ // prostorovy nebo kotlovy termostat vypne" u funkce zapaleni // drobne upravy textu/popisu jednotlivych parametru/funkci // v 27_3_2016 // uprava procesu zapalovani - nebude reagovat na prostorovy termostat // uprava dlouhych delayu na smycky, pro vyuziti watchdogu - autoreset pri zaseknuti procesou - doba nez se resetuje = 8s // nastaveni definice poruch pro pozdejsi vyuziti // v22_3_2016 // uprava ladicich textu pro termostaty // v21_3_2016 // presunuti testuPlamene pouze do smycky udrzuj horeni // doplneni textu do testu horeni // oprava textu zprav // zruseni diakritiky // zapnuti alarmu pri vyskytu poruchy // v20_3_2016 // slouceni podminenych funkci // vypnuti zhaveni pri rozepnuti termostatu (kotlovy nebo prostorovy) // rozdeleni funkci do vlastnich funkcnich bloku // zapojeni seriove komunikace pro odladeni funkci // v16_3_2016 // uprava podminky smycek (zruseno =) // posun zpozdeni 5s z procesu zapaleni na jeho konec // doplnena podminka reakce na termostaty (kotlovy/prostorovy) v procesu zapaleni // upravena doba na 1 zapalovaci proces - nastavitelna trimrem na analog.vstupu A0. v rozsahu 60 - 600 s = 1 - 10 min. - nastaveni pouze v dobe necinosti kotle // nastaveni poruchy a jeji kvitance tlacitkem na pinu 9 // definice poruch // bit funkce // 0 prehrati kotle pri zapalovani // 1 ztrata plamene pri horeni // 2 volne // 3 volne // 4 volne // 5 volne // 6 volne // 7 volne // knihovna watchdogu #include <avr/wdt.h> #define davkovaniPelet 2 //davkovani pelet snek #define spirala 3 //zapalovaci spirala #define ventilator 5 //ventilator #define alarm 6 //signalizace poruchy #define prostorovyTermostat 7 //prostorovy termostat #define kotlovyTermostat 8 //kotlovy termostat #define fotobunka 15 //fotobunka pro kontrolu plamene DI15 = A1 pro arduino UNO #define trimr1 14 // nastaveni doby zapaleni DI14 = A0 pro arduino UNO #define tlacitkoKvitance 9 // pin tlacitka kvitance poruchy int smycka1 = 0; // pomocna smycka - zapaleni int smycka1max = 600; // max.pomocne smycky - ted jiz nastavitelne trimrem na A0 60-600s int smycka2 = 0; // pomocna smycka - udrzeni horeni int smycka2max = 2; // max.pomocne smycky int smycka3 = 0; // pomocna smycka - pocet pokusu o zapaleni int smycka3max = 2; // max.pomocne smycky int smycka4 = 0; // pomocna smycka - davkovani zapalne davky pelet int smycka4max = 110; // max.pomocne smycky int smycka5 = 0; // pomocna smycka - rozhoreni int smycka5max = 50; // max.pomocne smycky int smycka6 = 0; // pomocna smycka - dohoreni int smycka6max = 840; // max.pomocne smycky byte porucha = 0; // promenna pro zaznam poruchy int ldr = 1; //analogovy pin kde je pripojen fotorezistor int ldr_value = 0; //promenna pro zaznam hodnot z fotorezistoru void setup() { // nastav seriovou komunikaci na rychlost 9600 bd Serial.begin(9600); Serial.println("Nastavuji vstupy/vystupy"); // ladici seriova komunikace pinMode(davkovaniPelet, OUTPUT); pinMode(spirala, OUTPUT); pinMode(ventilator, OUTPUT); pinMode(alarm, OUTPUT); pinMode(prostorovyTermostat, INPUT); pinMode(kotlovyTermostat, INPUT); pinMode(fotobunka, INPUT); pinMode(trimr1, INPUT); pinMode(tlacitkoKvitance, INPUT); // vsechno vypni vypniVse(); // nastav watchdog na 8s wdt_enable(WDTO_8S); } void loop() { wdt_reset(); // resetuj watchdog ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Cekam na sepnuti termostatu ..."); // ladici seriova komunikace smycka1max = map(analogRead(trimr1), 0, 1024, 60, 600); // nastaveni doby zapaleni trimrem na A0 if(digitalRead(prostorovyTermostat) == HIGH){ // prostorovy termostat je zapnuty Serial.println("Prostorovy termostat zapnut"); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty Serial.println("Kotlovy termostat zapnut"); // ladici seriova komunikace // startovaci davka pelet //------------------------ zapalovaciDavkaPelet(); // proces zapaleni //---------------- zapaleni(); // test poruchy // ----------------- //testPlamene(); // udrzeni horeni //-------------- udrzujHoreni(); // dohoreni //--------- dohoreni(); } } else { Serial.println("Prostorovy termostat vypnut"); // ladici seriova komunikace } // kvitence pripadne poruchy //------------------------------- kvitancePoruchy(); } void vypniVse() { // funkce vypni vse Serial.println("Vypinam vsechny rele ..."); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani digitalWrite(spirala, HIGH); //vypni zhaveni digitalWrite(ventilator, HIGH); //vypni ventilator } void zapalovaciDavkaPelet() { // prvotni davkovani pelet pro zapaleni Serial.println("Davkuji pelety pro zapaleni ... 110s"); // ladici seriova komunikace digitalWrite(davkovaniPelet, LOW); //davkuj pelety for (smycka4 = 0; smycka4 < smycka4max; smycka4 ++){ delay(1000); wdt_reset(); // resetuj watchdog } digitalWrite(davkovaniPelet, HIGH); //potom vypni davkovani digitalWrite(ventilator, LOW); //zapni ventilator digitalWrite(spirala, LOW); //zapni zhaveni } void zapaleni() { // funkce zapaleni pelet // 3 pokusy o zapaleni Serial.println("Spoustim zapaleni ..."); // ladici seriova komunikace for (smycka3 = 0; smycka3 < smycka3max; smycka3 ++){ // smycka "1-10" minut zapalovani for (smycka1 = 0; smycka1 < smycka1max; smycka1 ++){ wdt_reset(); // resetuj watchdog Serial.print("Pokus "); // ladici seriova komunikace Serial.print(smycka3); // ladici seriova komunikace Serial.print("/"); // ladici seriova komunikace Serial.print(smycka3max); // ladici seriova komunikace Serial.print(" stav: "); // ladici seriova komunikace Serial.print(smycka1); // ladici seriova komunikace Serial.print("s/"); // ladici seriova komunikace Serial.print(smycka1max); // ladici seriova komunikace Serial.println("s "); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == LOW){ // kotlovy termostat vypne digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println("Rozepnuti termostatu ..."); // ladici seriova komunikace bitSet(porucha,0); // nastav poruchu bit c.0 na "1" } if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println(" hori ..."); // ladici seriova komunikace } else { Serial.println(" nehori ..."); // ladici seriova komunikace } delay(1000); } for (smycka5 = 0; smycka5 < smycka5max; smycka5 ++){ delay(1000); wdt_reset(); // resetuj watchdog } //delay(5000); //cekej 5s } } void udrzujHoreni() { // funkce udrzeni horeni ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Udrzeni horeni ..."); // ladici seriova komunikace for (smycka2 = 0; smycka2 < smycka2max; smycka2 ++){ wdt_reset(); // resetuj watchdog smycka2 = 0; // vynuluj smycku if(digitalRead(prostorovyTermostat) == HIGH && digitalRead(kotlovyTermostat) == HIGH){ // prostorovy + kotlovy termostat je zapnuty if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen Serial.println("Test plamene ... hori"); // ladici seriova komunikace digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(8000); //pockej 8s digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(1000); //pockej 1s } else { delay(1000); // pocekej jeste 1s a zkus to znovu if(analogRead(fotobunka) >= 500){ //pokud fotobunka nevidi plamen Serial.println("Test plamene ... porucha"); // ladici seriova komunikace smycka2 = smycka2max; // ukonci smycku //porucha = 1; // nastav poruchu bitSet(porucha,1); // nastav poruchu bit c.1 na "1" digitalWrite(alarm, LOW); // zapni alarm } } } else { smycka2 = smycka2max; // ukonci smycku } } } void dohoreni() { // funkce dohoreni Serial.println("Dohoreni ..."); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani pelet digitalWrite(spirala, HIGH); //vypni zhaveni - pro jistotu for (smycka6 = 0; smycka6 < smycka6max; smycka6 ++){ delay(1000); wdt_reset(); // resetuj watchdog } digitalWrite(ventilator, HIGH); //vypni ventilator } void kvitancePoruchy() { // funkce kvitance poruchy if(porucha > 0 ){ // kdyz je porucha aktivni Serial.println("Kvitance poruchy ..."); // ladici seriova komunikace // vypni vse vypniVse(); while (digitalRead(tlacitkoKvitance) == LOW) { // zapni alarm a cekej na stisk tlacitka digitalWrite(alarm, LOW); // zapni alarm Serial.println("Porucha ... cekam na kvitanci"); // ladici seriova komunikace wdt_reset(); // resetuj watchdog } Serial.println("Porucha kvitovana ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm porucha = 0; // vynuluj poruchu } else { // jinak Serial.println("Zadna porucha ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm } }Měním čas(zpoždění) u funkce „udrzujHoreni“:
digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(8000); //pockej 8s digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(1000); //pockej 1sPůvodně tam bylo 1s davkovani pelet a 1s vypnuto davkovani. To fungovalo bez problémů, ale když změním zpoždění „vypni davkovani“ na jiný čas než 1s tak to nejde.
6.11.2016 v 21:11 #9126Účastníka kde máš to resetování watchdogu? 🙂
digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(1000); //pockej 1s wdt_reset(); // resetuj watchdog6.11.2016 v 21:31 #9127ÚčastníkPořád nevím jestli jsme se dobře pochopili, dávkování funguje (tam potřebuju těch 8s), ale pauza (vypni dávkování) nefunguje. Tam bych potřeboval nastavit těch 10s. Když to změním na jinou hodnotu než 1s tak to nejede.
7.11.2016 v 21:16 #9147Účastníkjohny, johny …. já tě chápu ale obávám se že je to pouze 1smerná komunikace. Nevím jak jinak ti to vysvětlit. Spočítal sis kolik je 8s + 1s ?
7.11.2016 v 22:32 #9148ÚčastníkTo jsem právě počítal a proto to nemůžu pořád pochopit. Takže 8s+1s=9s a watchdog má maximum 8s. Nicméně jsem to zkusil podle tvojí rady (rozdělit to) a Heureka! funguje to!
Tady je tedy výsledná změněná část kódu:digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog8.11.2016 v 0:07 #9152Účastníksuper …
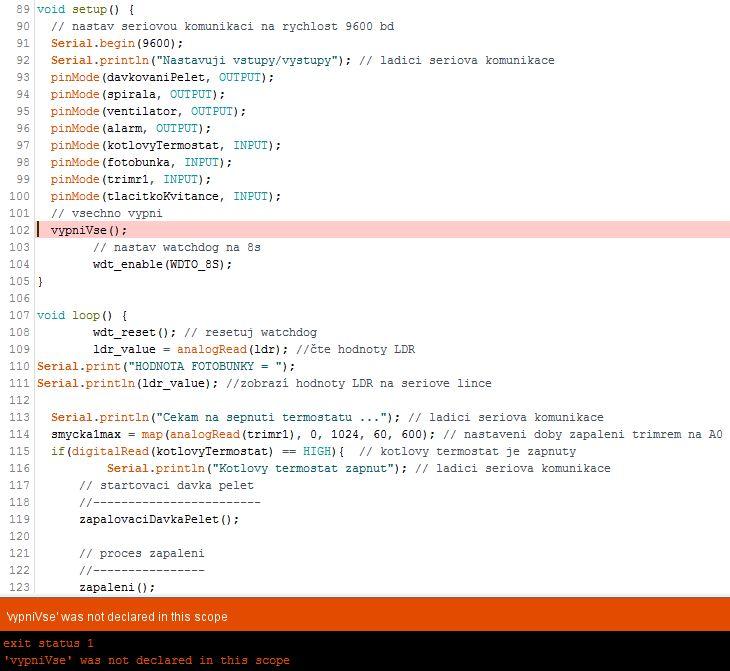
13.11.2016 v 18:10 #9203ÚčastníkAhoj, tak jsem se opět pustil do editace kódu. Upravil jsem sériovou komunikaci (přidal jsem počítadla k jednotlivým funkcím, abych měl lepší přehled o aktuální situaci co zrovna Arduino dělá -> jak běží čas) a dál jsem se pokusil zrušit reakci na prostorový termostat, ale to se mi nějak nedaří. Po promazání řádků kde byl prostorový termostat mi vyskakuje chyba:
Arduino: 1.6.12 (Windows 10), Vývojová deska: "Arduino/Genuino Uno" In function 'void setup()': kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:102: error: 'vypniVse' was not declared in this scope vypniVse(); ^ In function 'void loop()': kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:119: error: 'zapalovaciDavkaPelet' was not declared in this scope zapalovaciDavkaPelet(); ^ kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:123: error: 'zapaleni' was not declared in this scope zapaleni(); ^ kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:131: error: 'udrzujHoreni' was not declared in this scope udrzujHoreni(); ^ kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:135: error: 'dohoreni' was not declared in this scope dohoreni(); ^ At global scope: kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:137: error: expected unqualified-id before 'else' } else { ^ kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:142: error: expected constructor, destructor, or type conversion before ';' token kvitancePoruchy(); ^ kotel_demo14_zruseni_reakce_na_prostorovy_termostat.ino:143: error: expected declaration before '}' token } ^ exit status 1 'vypniVse' was not declared in this scope Táto zpráva by měla mít víc informacií v "Zobrazení podrobného výstupu při kompilaci" podle zapnuté volby v Soubor -> Nastavení.Tady je ještě aktuální kód:
// REGULACE PELETKOVEHO KOTLE // author. Johnyhol & by JP // v 14_5_2016 // changelog // v 13_11_2016 // zrusena reakce na prostorovy termostat -> není potreba, reseno jiz v kotli // v 10_11_2016 // uprava seriove komunikace -> pridani casovacu jednotlivych funkci // v 5_11_2016 // zmena casu - upraveno pro realny provoz // v 4_11_2016 // zmena vsech vystupu na rele // v 14_5_2016 // precislovani pinu // zmena funkce fotobunky z digitalu na analog // dolpneni seriove komunikace o hodnotu fotobunky // v 30_3_2016 // oprava funkce tlacitka kvitace poruchy -> HIGH->LOW // umazani parametru "long cas=13000;" -> jiz neni potreba // umazani parametru "//delay(84000); //pockej 84s" u funkce dohoreni -> jiz neni potreba // umazani parametru "//delay(12000); //po dobu 12s" u funkce davkovani zapalovaci davky pelet -> jiz neni potreba // umazani parametru "//if(digitalRead(prostorovyTermostat) == LOW || digitalRead(kotlovyTermostat) == LOW){ // prostorovy nebo kotlovy termostat vypne" u funkce zapaleni // drobne upravy textu/popisu jednotlivych parametru/funkci // v 27_3_2016 // uprava procesu zapalovani - nebude reagovat na prostorovy termostat // uprava dlouhych delayu na smycky, pro vyuziti watchdogu - autoreset pri zaseknuti procesou - doba nez se resetuje = 8s // nastaveni definice poruch pro pozdejsi vyuziti // v22_3_2016 // uprava ladicich textu pro termostaty // v21_3_2016 // presunuti testuPlamene pouze do smycky udrzuj horeni // doplneni textu do testu horeni // oprava textu zprav // zruseni diakritiky // zapnuti alarmu pri vyskytu poruchy // v20_3_2016 // slouceni podminenych funkci // vypnuti zhaveni pri rozepnuti termostatu (kotlovy nebo prostorovy) // rozdeleni funkci do vlastnich funkcnich bloku // zapojeni seriove komunikace pro odladeni funkci // v16_3_2016 // uprava podminky smycek (zruseno =) // posun zpozdeni 5s z procesu zapaleni na jeho konec // doplnena podminka reakce na termostaty (kotlovy/prostorovy) v procesu zapaleni // upravena doba na 1 zapalovaci proces - nastavitelna trimrem na analog.vstupu A0. v rozsahu 60 - 600 s = 1 - 10 min. - nastaveni pouze v dobe necinosti kotle // nastaveni poruchy a jeji kvitance tlacitkem na pinu 9 // definice poruch // bit funkce // 0 prehrati kotle pri zapalovani // 1 ztrata plamene pri horeni // 2 volne // 3 volne // 4 volne // 5 volne // 6 volne // 7 volne // knihovna watchdogu #include <avr/wdt.h> #define davkovaniPelet 2 //davkovani pelet snek #define spirala 3 //zapalovaci spirala #define ventilator 5 //ventilator #define alarm 6 //signalizace poruchy #define kotlovyTermostat 8 //kotlovy termostat #define fotobunka 15 //fotobunka pro kontrolu plamene DI15 = A1 pro arduino UNO #define trimr1 14 // nastaveni doby zapaleni DI14 = A0 pro arduino UNO #define tlacitkoKvitance 9 // pin tlacitka kvitance poruchy int smycka1 = 0; // pomocna smycka - zapaleni int smycka1max = 600; // max.pomocne smycky - ted jiz nastavitelne trimrem na A0 60-600s int smycka2 = 0; // pomocna smycka - udrzeni horeni int smycka2max = 2; // max.pomocne smycky int smycka3 = 0; // pomocna smycka - pocet pokusu o zapaleni int smycka3max = 2; // max.pomocne smycky int smycka4 = 0; // pomocna smycka - davkovani zapalne davky pelet int smycka4max = 10; // max.pomocne smycky int smycka5 = 0; // pomocna smycka - rozhoreni int smycka5max = 5; // max.pomocne smycky int smycka6 = 0; // pomocna smycka - dohoreni int smycka6max = 840; // max.pomocne smycky byte porucha = 0; // promenna pro zaznam poruchy int ldr = 1; //analogovy pin kde je pripojen fotorezistor int ldr_value = 0; //promenna pro zaznam hodnot z fotorezistoru void setup() { // nastav seriovou komunikaci na rychlost 9600 bd Serial.begin(9600); Serial.println("Nastavuji vstupy/vystupy"); // ladici seriova komunikace pinMode(davkovaniPelet, OUTPUT); pinMode(spirala, OUTPUT); pinMode(ventilator, OUTPUT); pinMode(alarm, OUTPUT); pinMode(kotlovyTermostat, INPUT); pinMode(fotobunka, INPUT); pinMode(trimr1, INPUT); pinMode(tlacitkoKvitance, INPUT); // vsechno vypni vypniVse(); // nastav watchdog na 8s wdt_enable(WDTO_8S); } void loop() { wdt_reset(); // resetuj watchdog ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Cekam na sepnuti termostatu ..."); // ladici seriova komunikace smycka1max = map(analogRead(trimr1), 0, 1024, 60, 600); // nastaveni doby zapaleni trimrem na A0 if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty Serial.println("Kotlovy termostat zapnut"); // ladici seriova komunikace // startovaci davka pelet //------------------------ zapalovaciDavkaPelet(); // proces zapaleni //---------------- zapaleni(); // test poruchy // ----------------- //testPlamene(); // udrzeni horeni //-------------- udrzujHoreni(); // dohoreni //--------- dohoreni(); } } else { Serial.println("Prostorovy termostat vypnut"); // ladici seriova komunikace } // kvitence pripadne poruchy //------------------------------- kvitancePoruchy(); } void vypniVse() { // funkce vypni vse Serial.println("Vypinam vsechny rele ..."); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani digitalWrite(spirala, HIGH); //vypni zhaveni digitalWrite(ventilator, HIGH); //vypni ventilator } void zapalovaciDavkaPelet() { // prvotni davkovani pelet pro zapaleni Serial.println("Davkuji pelety pro zapaleni ... 110s"); // ladici seriova komunikace digitalWrite(davkovaniPelet, LOW); //davkuj pelety for (smycka4 = 0; smycka4 < smycka4max; smycka4 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka4); Serial.print("s/"); Serial.print(smycka4max); Serial.println("s "); } digitalWrite(davkovaniPelet, HIGH); //potom vypni davkovani digitalWrite(ventilator, LOW); //zapni ventilator digitalWrite(spirala, LOW); //zapni zhaveni } void zapaleni() { // funkce zapaleni pelet // 2 pokusy o zapaleni Serial.println("Spoustim zapaleni ..."); // ladici seriova komunikace for (smycka3 = 0; smycka3 < smycka3max; smycka3 ++){ // smycka "1-10" minut zapalovani for (smycka1 = 0; smycka1 < smycka1max; smycka1 ++){ wdt_reset(); // resetuj watchdog Serial.print("Pokus o zapaleni "); // ladici seriova komunikace Serial.print(smycka3); // ladici seriova komunikace Serial.print("/"); // ladici seriova komunikace Serial.println(smycka3max); // ladici seriova komunikace Serial.print("Stav: "); // ladici seriova komunikace Serial.print(smycka1); // ladici seriova komunikace Serial.print("s/"); // ladici seriova komunikace Serial.print(smycka1max); // ladici seriova komunikace Serial.println("s "); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == LOW){ // kotlovy termostat vypne digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println("Rozepnuti termostatu ..."); // ladici seriova komunikace bitSet(porucha,0); // nastav poruchu bit c.0 na "1" } if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println(" hori ..."); // ladici seriova komunikace Serial.println("Rozhoreni ... 50s "); } else { Serial.println(" nehori ..."); // ladici seriova komunikace } delay(1000); } for (smycka5 = 0; smycka5 < smycka5max; smycka5 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka5); Serial.print("s/"); Serial.print(smycka5max); Serial.println("s "); } //delay(5000); //cekej 5s } } void udrzujHoreni() { // funkce udrzeni horeni ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Udrzeni horeni ..."); // ladici seriova komunikace for (smycka2 = 0; smycka2 < smycka2max; smycka2 ++){ wdt_reset(); // resetuj watchdog smycka2 = 0; // vynuluj smycku if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen Serial.println("Test plamene ... hori"); // ladici seriova komunikace Serial.println("Davkuji pelety ... "); digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog //Serial.print("s/"); //Serial.print(davkovaniPelet, LOW); //Serial.print("s "); Serial.println("Pauza ... "); digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog } else { delay(1000); // pocekej jeste 1s a zkus to znovu if(analogRead(fotobunka) >= 500){ //pokud fotobunka nevidi plamen Serial.println("Test plamene ... porucha"); // ladici seriova komunikace smycka2 = smycka2max; // ukonci smycku //porucha = 1; // nastav poruchu bitSet(porucha,1); // nastav poruchu bit c.1 na "1" digitalWrite(alarm, LOW); // zapni alarm } } } else { smycka2 = smycka2max; // ukonci smycku } } } void dohoreni() { // funkce dohoreni Serial.println("Dohoreni ... 840s "); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani pelet digitalWrite(spirala, HIGH); //vypni zhaveni - pro jistotu for (smycka6 = 0; smycka6 < smycka6max; smycka6 ++){ Serial.print("Stav: "); Serial.print(smycka6); Serial.print("s/"); Serial.print(smycka6max); Serial.println("s "); delay(1000); wdt_reset(); // resetuj watchdog } digitalWrite(ventilator, HIGH); //vypni ventilator } void kvitancePoruchy() { // funkce kvitance poruchy if(porucha > 0 ){ // kdyz je porucha aktivni Serial.println("Kvitance poruchy ..."); // ladici seriova komunikace // vypni vse vypniVse(); while (digitalRead(tlacitkoKvitance) == LOW) { // zapni alarm a cekej na stisk tlacitka digitalWrite(alarm, LOW); // zapni alarm Serial.println("Porucha ... cekam na kvitanci"); // ladici seriova komunikace wdt_reset(); // resetuj watchdog } Serial.println("Porucha kvitovana ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm porucha = 0; // vynuluj poruchu } else { // jinak Serial.println("Zadna porucha ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm } }Původní (funkční) kód je tady:
// REGULACE PELETKOVEHO KOTLE // author. Johnyhol & by JP // v 14_5_2016 // changelog // v 10_11_2016 // uprava seriove komunikace -> pridani casovacu jednotlivych funkci // v 5_11_2016 // zmena casu - upraveno pro realny provoz // v 4_11_2016 // zmena vsech vystupu na rele // v 14_5_2016 // precislovani pinu // zmena funkce fotobunky z digitalu na analog // dolpneni seriove komunikace o hodnotu fotobunky // v 30_3_2016 // oprava funkce tlacitka kvitace poruchy -> HIGH->LOW // umazani parametru "long cas=13000;" -> jiz neni potreba // umazani parametru "//delay(84000); //pockej 84s" u funkce dohoreni -> jiz neni potreba // umazani parametru "//delay(12000); //po dobu 12s" u funkce davkovani zapalovaci davky pelet -> jiz neni potreba // umazani parametru "//if(digitalRead(prostorovyTermostat) == LOW || digitalRead(kotlovyTermostat) == LOW){ // prostorovy nebo kotlovy termostat vypne" u funkce zapaleni // drobne upravy textu/popisu jednotlivych parametru/funkci // v 27_3_2016 // uprava procesu zapalovani - nebude reagovat na prostorovy termostat // uprava dlouhych delayu na smycky, pro vyuziti watchdogu - autoreset pri zaseknuti procesou - doba nez se resetuje = 8s // nastaveni definice poruch pro pozdejsi vyuziti // v22_3_2016 // uprava ladicich textu pro termostaty // v21_3_2016 // presunuti testuPlamene pouze do smycky udrzuj horeni // doplneni textu do testu horeni // oprava textu zprav // zruseni diakritiky // zapnuti alarmu pri vyskytu poruchy // v20_3_2016 // slouceni podminenych funkci // vypnuti zhaveni pri rozepnuti termostatu (kotlovy nebo prostorovy) // rozdeleni funkci do vlastnich funkcnich bloku // zapojeni seriove komunikace pro odladeni funkci // v16_3_2016 // uprava podminky smycek (zruseno =) // posun zpozdeni 5s z procesu zapaleni na jeho konec // doplnena podminka reakce na termostaty (kotlovy/prostorovy) v procesu zapaleni // upravena doba na 1 zapalovaci proces - nastavitelna trimrem na analog.vstupu A0. v rozsahu 60 - 600 s = 1 - 10 min. - nastaveni pouze v dobe necinosti kotle // nastaveni poruchy a jeji kvitance tlacitkem na pinu 9 // definice poruch // bit funkce // 0 prehrati kotle pri zapalovani // 1 ztrata plamene pri horeni // 2 volne // 3 volne // 4 volne // 5 volne // 6 volne // 7 volne // knihovna watchdogu #include <avr/wdt.h> #define davkovaniPelet 2 //davkovani pelet snek #define spirala 3 //zapalovaci spirala #define ventilator 5 //ventilator #define alarm 6 //signalizace poruchy #define prostorovyTermostat 7 //prostorovy termostat #define kotlovyTermostat 8 //kotlovy termostat #define fotobunka 15 //fotobunka pro kontrolu plamene DI15 = A1 pro arduino UNO #define trimr1 14 // nastaveni doby zapaleni DI14 = A0 pro arduino UNO #define tlacitkoKvitance 9 // pin tlacitka kvitance poruchy int smycka1 = 0; // pomocna smycka - zapaleni int smycka1max = 600; // max.pomocne smycky - ted jiz nastavitelne trimrem na A0 60-600s int smycka2 = 0; // pomocna smycka - udrzeni horeni int smycka2max = 2; // max.pomocne smycky int smycka3 = 0; // pomocna smycka - pocet pokusu o zapaleni int smycka3max = 2; // max.pomocne smycky int smycka4 = 0; // pomocna smycka - davkovani zapalne davky pelet int smycka4max = 10; // max.pomocne smycky int smycka5 = 0; // pomocna smycka - rozhoreni int smycka5max = 5; // max.pomocne smycky int smycka6 = 0; // pomocna smycka - dohoreni int smycka6max = 840; // max.pomocne smycky byte porucha = 0; // promenna pro zaznam poruchy int ldr = 1; //analogovy pin kde je pripojen fotorezistor int ldr_value = 0; //promenna pro zaznam hodnot z fotorezistoru void setup() { // nastav seriovou komunikaci na rychlost 9600 bd Serial.begin(9600); Serial.println("Nastavuji vstupy/vystupy"); // ladici seriova komunikace pinMode(davkovaniPelet, OUTPUT); pinMode(spirala, OUTPUT); pinMode(ventilator, OUTPUT); pinMode(alarm, OUTPUT); pinMode(prostorovyTermostat, INPUT); pinMode(kotlovyTermostat, INPUT); pinMode(fotobunka, INPUT); pinMode(trimr1, INPUT); pinMode(tlacitkoKvitance, INPUT); // vsechno vypni vypniVse(); // nastav watchdog na 8s wdt_enable(WDTO_8S); } void loop() { wdt_reset(); // resetuj watchdog ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Cekam na sepnuti termostatu ..."); // ladici seriova komunikace smycka1max = map(analogRead(trimr1), 0, 1024, 60, 600); // nastaveni doby zapaleni trimrem na A0 if(digitalRead(prostorovyTermostat) == HIGH){ // prostorovy termostat je zapnuty Serial.println("Prostorovy termostat zapnut"); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty Serial.println("Kotlovy termostat zapnut"); // ladici seriova komunikace // startovaci davka pelet //------------------------ zapalovaciDavkaPelet(); // proces zapaleni //---------------- zapaleni(); // test poruchy // ----------------- //testPlamene(); // udrzeni horeni //-------------- udrzujHoreni(); // dohoreni //--------- dohoreni(); } } else { Serial.println("Prostorovy termostat vypnut"); // ladici seriova komunikace } // kvitence pripadne poruchy //------------------------------- kvitancePoruchy(); } void vypniVse() { // funkce vypni vse Serial.println("Vypinam vsechny rele ..."); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani digitalWrite(spirala, HIGH); //vypni zhaveni digitalWrite(ventilator, HIGH); //vypni ventilator } void zapalovaciDavkaPelet() { // prvotni davkovani pelet pro zapaleni Serial.println("Davkuji pelety pro zapaleni ... 110s"); // ladici seriova komunikace digitalWrite(davkovaniPelet, LOW); //davkuj pelety for (smycka4 = 0; smycka4 < smycka4max; smycka4 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka4); Serial.print("s/"); Serial.print(smycka4max); Serial.println("s "); } digitalWrite(davkovaniPelet, HIGH); //potom vypni davkovani digitalWrite(ventilator, LOW); //zapni ventilator digitalWrite(spirala, LOW); //zapni zhaveni } void zapaleni() { // funkce zapaleni pelet // 2 pokusy o zapaleni Serial.println("Spoustim zapaleni ..."); // ladici seriova komunikace for (smycka3 = 0; smycka3 < smycka3max; smycka3 ++){ // smycka "1-10" minut zapalovani for (smycka1 = 0; smycka1 < smycka1max; smycka1 ++){ wdt_reset(); // resetuj watchdog Serial.print("Pokus o zapaleni "); // ladici seriova komunikace Serial.print(smycka3); // ladici seriova komunikace Serial.print("/"); // ladici seriova komunikace Serial.println(smycka3max); // ladici seriova komunikace Serial.print("Stav: "); // ladici seriova komunikace Serial.print(smycka1); // ladici seriova komunikace Serial.print("s/"); // ladici seriova komunikace Serial.print(smycka1max); // ladici seriova komunikace Serial.println("s "); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == LOW){ // kotlovy termostat vypne digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println("Rozepnuti termostatu ..."); // ladici seriova komunikace bitSet(porucha,0); // nastav poruchu bit c.0 na "1" } if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println(" hori ..."); // ladici seriova komunikace Serial.println("Rozhoreni ... 50s "); } else { Serial.println(" nehori ..."); // ladici seriova komunikace } delay(1000); } for (smycka5 = 0; smycka5 < smycka5max; smycka5 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka5); Serial.print("s/"); Serial.print(smycka5max); Serial.println("s "); } //delay(5000); //cekej 5s } } void udrzujHoreni() { // funkce udrzeni horeni ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Udrzeni horeni ..."); // ladici seriova komunikace for (smycka2 = 0; smycka2 < smycka2max; smycka2 ++){ wdt_reset(); // resetuj watchdog smycka2 = 0; // vynuluj smycku if(digitalRead(prostorovyTermostat) == HIGH && digitalRead(kotlovyTermostat) == HIGH){ // prostorovy + kotlovy termostat je zapnuty if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen Serial.println("Test plamene ... hori"); // ladici seriova komunikace Serial.println("Davkuji pelety ... "); digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog //Serial.print("s/"); //Serial.print(davkovaniPelet, LOW); //Serial.print("s "); Serial.println("Pauza ... "); digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog } else { delay(1000); // pocekej jeste 1s a zkus to znovu if(analogRead(fotobunka) >= 500){ //pokud fotobunka nevidi plamen Serial.println("Test plamene ... porucha"); // ladici seriova komunikace smycka2 = smycka2max; // ukonci smycku //porucha = 1; // nastav poruchu bitSet(porucha,1); // nastav poruchu bit c.1 na "1" digitalWrite(alarm, LOW); // zapni alarm } } } else { smycka2 = smycka2max; // ukonci smycku } } } void dohoreni() { // funkce dohoreni Serial.println("Dohoreni ... 840s "); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani pelet digitalWrite(spirala, HIGH); //vypni zhaveni - pro jistotu for (smycka6 = 0; smycka6 < smycka6max; smycka6 ++){ Serial.print("Stav: "); Serial.print(smycka6); Serial.print("s/"); Serial.print(smycka6max); Serial.println("s "); delay(1000); wdt_reset(); // resetuj watchdog } digitalWrite(ventilator, HIGH); //vypni ventilator } void kvitancePoruchy() { // funkce kvitance poruchy if(porucha > 0 ){ // kdyz je porucha aktivni Serial.println("Kvitance poruchy ..."); // ladici seriova komunikace // vypni vse vypniVse(); while (digitalRead(tlacitkoKvitance) == LOW) { // zapni alarm a cekej na stisk tlacitka digitalWrite(alarm, LOW); // zapni alarm Serial.println("Porucha ... cekam na kvitanci"); // ladici seriova komunikace wdt_reset(); // resetuj watchdog } Serial.println("Porucha kvitovana ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm porucha = 0; // vynuluj poruchu } else { // jinak Serial.println("Zadna porucha ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm } }Attachments:
13.11.2016 v 20:57 #9206Účastníkodstranil jsem 1 chybu kterou jsem našel a arduino mi jej normálně skompiluje.
Chyba byla v prebytecne zavorce v setup().// REGULACE PELETKOVEHO KOTLE // author. Johnyhol & by JP // v 14_5_2016 // changelog // v 13_11_2016 // zrusena reakce na prostorovy termostat -> není potreba, reseno jiz v kotli // v 10_11_2016 // uprava seriove komunikace -> pridani casovacu jednotlivych funkci // v 5_11_2016 // zmena casu - upraveno pro realny provoz // v 4_11_2016 // zmena vsech vystupu na rele // v 14_5_2016 // precislovani pinu // zmena funkce fotobunky z digitalu na analog // dolpneni seriove komunikace o hodnotu fotobunky // v 30_3_2016 // oprava funkce tlacitka kvitace poruchy -> HIGH->LOW // umazani parametru "long cas=13000;" -> jiz neni potreba // umazani parametru "//delay(84000); //pockej 84s" u funkce dohoreni -> jiz neni potreba // umazani parametru "//delay(12000); //po dobu 12s" u funkce davkovani zapalovaci davky pelet -> jiz neni potreba // umazani parametru "//if(digitalRead(prostorovyTermostat) == LOW || digitalRead(kotlovyTermostat) == LOW){ // prostorovy nebo kotlovy termostat vypne" u funkce zapaleni // drobne upravy textu/popisu jednotlivych parametru/funkci // v 27_3_2016 // uprava procesu zapalovani - nebude reagovat na prostorovy termostat // uprava dlouhych delayu na smycky, pro vyuziti watchdogu - autoreset pri zaseknuti procesou - doba nez se resetuje = 8s // nastaveni definice poruch pro pozdejsi vyuziti // v22_3_2016 // uprava ladicich textu pro termostaty // v21_3_2016 // presunuti testuPlamene pouze do smycky udrzuj horeni // doplneni textu do testu horeni // oprava textu zprav // zruseni diakritiky // zapnuti alarmu pri vyskytu poruchy // v20_3_2016 // slouceni podminenych funkci // vypnuti zhaveni pri rozepnuti termostatu (kotlovy nebo prostorovy) // rozdeleni funkci do vlastnich funkcnich bloku // zapojeni seriove komunikace pro odladeni funkci // v16_3_2016 // uprava podminky smycek (zruseno =) // posun zpozdeni 5s z procesu zapaleni na jeho konec // doplnena podminka reakce na termostaty (kotlovy/prostorovy) v procesu zapaleni // upravena doba na 1 zapalovaci proces - nastavitelna trimrem na analog.vstupu A0. v rozsahu 60 - 600 s = 1 - 10 min. - nastaveni pouze v dobe necinosti kotle // nastaveni poruchy a jeji kvitance tlacitkem na pinu 9 // definice poruch // bit funkce // 0 prehrati kotle pri zapalovani // 1 ztrata plamene pri horeni // 2 volne // 3 volne // 4 volne // 5 volne // 6 volne // 7 volne // knihovna watchdogu #include <avr/wdt.h> #define davkovaniPelet 2 //davkovani pelet snek #define spirala 3 //zapalovaci spirala #define ventilator 5 //ventilator #define alarm 6 //signalizace poruchy #define kotlovyTermostat 8 //kotlovy termostat #define fotobunka 15 //fotobunka pro kontrolu plamene DI15 = A1 pro arduino UNO #define trimr1 14 // nastaveni doby zapaleni DI14 = A0 pro arduino UNO #define tlacitkoKvitance 9 // pin tlacitka kvitance poruchy int smycka1 = 0; // pomocna smycka - zapaleni int smycka1max = 600; // max.pomocne smycky - ted jiz nastavitelne trimrem na A0 60-600s int smycka2 = 0; // pomocna smycka - udrzeni horeni int smycka2max = 2; // max.pomocne smycky int smycka3 = 0; // pomocna smycka - pocet pokusu o zapaleni int smycka3max = 2; // max.pomocne smycky int smycka4 = 0; // pomocna smycka - davkovani zapalne davky pelet int smycka4max = 10; // max.pomocne smycky int smycka5 = 0; // pomocna smycka - rozhoreni int smycka5max = 5; // max.pomocne smycky int smycka6 = 0; // pomocna smycka - dohoreni int smycka6max = 840; // max.pomocne smycky byte porucha = 0; // promenna pro zaznam poruchy int ldr = 1; //analogovy pin kde je pripojen fotorezistor int ldr_value = 0; //promenna pro zaznam hodnot z fotorezistoru void setup() { // nastav seriovou komunikaci na rychlost 9600 bd Serial.begin(9600); Serial.println("Nastavuji vstupy/vystupy"); // ladici seriova komunikace pinMode(davkovaniPelet, OUTPUT); pinMode(spirala, OUTPUT); pinMode(ventilator, OUTPUT); pinMode(alarm, OUTPUT); pinMode(kotlovyTermostat, INPUT); pinMode(fotobunka, INPUT); pinMode(trimr1, INPUT); pinMode(tlacitkoKvitance, INPUT); // vsechno vypni vypniVse(); // nastav watchdog na 8s wdt_enable(WDTO_8S); } void loop() { wdt_reset(); // resetuj watchdog ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Cekam na sepnuti termostatu ..."); // ladici seriova komunikace smycka1max = map(analogRead(trimr1), 0, 1024, 60, 600); // nastaveni doby zapaleni trimrem na A0 if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty Serial.println("Kotlovy termostat zapnut"); // ladici seriova komunikace // startovaci davka pelet //------------------------ zapalovaciDavkaPelet(); // proces zapaleni //---------------- zapaleni(); // test poruchy // ----------------- //testPlamene(); // udrzeni horeni //-------------- udrzujHoreni(); // dohoreni //--------- dohoreni(); //} - #1 chyba - navic 1x slozena zavorka } else { Serial.println("Prostorovy termostat vypnut"); // ladici seriova komunikace } // kvitence pripadne poruchy //------------------------------- kvitancePoruchy(); } void vypniVse() { // funkce vypni vse Serial.println("Vypinam vsechny rele ..."); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani digitalWrite(spirala, HIGH); //vypni zhaveni digitalWrite(ventilator, HIGH); //vypni ventilator } void zapalovaciDavkaPelet() { // prvotni davkovani pelet pro zapaleni Serial.println("Davkuji pelety pro zapaleni ... 110s"); // ladici seriova komunikace digitalWrite(davkovaniPelet, LOW); //davkuj pelety for (smycka4 = 0; smycka4 < smycka4max; smycka4 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka4); Serial.print("s/"); Serial.print(smycka4max); Serial.println("s "); } digitalWrite(davkovaniPelet, HIGH); //potom vypni davkovani digitalWrite(ventilator, LOW); //zapni ventilator digitalWrite(spirala, LOW); //zapni zhaveni } void zapaleni() { // funkce zapaleni pelet // 2 pokusy o zapaleni Serial.println("Spoustim zapaleni ..."); // ladici seriova komunikace for (smycka3 = 0; smycka3 < smycka3max; smycka3 ++){ // smycka "1-10" minut zapalovani for (smycka1 = 0; smycka1 < smycka1max; smycka1 ++){ wdt_reset(); // resetuj watchdog Serial.print("Pokus o zapaleni "); // ladici seriova komunikace Serial.print(smycka3); // ladici seriova komunikace Serial.print("/"); // ladici seriova komunikace Serial.println(smycka3max); // ladici seriova komunikace Serial.print("Stav: "); // ladici seriova komunikace Serial.print(smycka1); // ladici seriova komunikace Serial.print("s/"); // ladici seriova komunikace Serial.print(smycka1max); // ladici seriova komunikace Serial.println("s "); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == LOW){ // kotlovy termostat vypne digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println("Rozepnuti termostatu ..."); // ladici seriova komunikace bitSet(porucha,0); // nastav poruchu bit c.0 na "1" } if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println(" hori ..."); // ladici seriova komunikace Serial.println("Rozhoreni ... 50s "); } else { Serial.println(" nehori ..."); // ladici seriova komunikace } delay(1000); } for (smycka5 = 0; smycka5 < smycka5max; smycka5 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka5); Serial.print("s/"); Serial.print(smycka5max); Serial.println("s "); } //delay(5000); //cekej 5s } } void udrzujHoreni() { // funkce udrzeni horeni ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Udrzeni horeni ..."); // ladici seriova komunikace for (smycka2 = 0; smycka2 < smycka2max; smycka2 ++){ wdt_reset(); // resetuj watchdog smycka2 = 0; // vynuluj smycku if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen Serial.println("Test plamene ... hori"); // ladici seriova komunikace Serial.println("Davkuji pelety ... "); digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog //Serial.print("s/"); //Serial.print(davkovaniPelet, LOW); //Serial.print("s "); Serial.println("Pauza ... "); digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog } else { delay(1000); // pocekej jeste 1s a zkus to znovu if(analogRead(fotobunka) >= 500){ //pokud fotobunka nevidi plamen Serial.println("Test plamene ... porucha"); // ladici seriova komunikace smycka2 = smycka2max; // ukonci smycku //porucha = 1; // nastav poruchu bitSet(porucha,1); // nastav poruchu bit c.1 na "1" digitalWrite(alarm, LOW); // zapni alarm } } } else { smycka2 = smycka2max; // ukonci smycku } } } void dohoreni() { // funkce dohoreni Serial.println("Dohoreni ... 840s "); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani pelet digitalWrite(spirala, HIGH); //vypni zhaveni - pro jistotu for (smycka6 = 0; smycka6 < smycka6max; smycka6 ++){ Serial.print("Stav: "); Serial.print(smycka6); Serial.print("s/"); Serial.print(smycka6max); Serial.println("s "); delay(1000); wdt_reset(); // resetuj watchdog } digitalWrite(ventilator, HIGH); //vypni ventilator } void kvitancePoruchy() { // funkce kvitance poruchy if(porucha > 0 ){ // kdyz je porucha aktivni Serial.println("Kvitance poruchy ..."); // ladici seriova komunikace // vypni vse vypniVse(); while (digitalRead(tlacitkoKvitance) == LOW) { // zapni alarm a cekej na stisk tlacitka digitalWrite(alarm, LOW); // zapni alarm Serial.println("Porucha ... cekam na kvitanci"); // ladici seriova komunikace wdt_reset(); // resetuj watchdog } Serial.println("Porucha kvitovana ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm porucha = 0; // vynuluj poruchu } else { // jinak Serial.println("Zadna porucha ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm } }13.11.2016 v 22:17 #9207ÚčastníkProsím tě kde přesně byla ta chyba, koukám tu na to a připadá mi to úplně stejný. Jinak to po tvým zásahu jako vždy funguje 🙂
Díky moc!
14.11.2016 v 7:06 #9208Účastník// dohoreni //--------- dohoreni(); //} - #1 chyba - navic 1x slozena zavorka } else { Serial.println("Prostorovy termostat vypnut"); // ladici seriova komunikace }14.11.2016 v 7:59 #9209ÚčastníkAha, tak to mě vůbec nenapadlo, tam jsem s tím oproti předešlý verzi nic nedělal. Proč to tedy teď nefungovalo, když to předtím s tou závorkou šlo? Potřeboval bych to dovysvětlit.
Díky!14.11.2016 v 21:30 #9211Účastníkto nemohlo fungovat … nech to být. Je opraveno a připraveno k testování 🙂
14.11.2016 v 21:57 #9212ÚčastníkPrávě že to fungovalo, jenom jsem promazal části kódu kde byl prostorový termostat a na závorky jsem nesahal. Proto se divím, hlavně proč mi to hlásilo chybu ve „void setup -> vypniVse ();“, když ta závorka navíc byla ve void loop. Chtěl bych to pochopit, abych se toho do budoucna vyvaroval.
Ještě jeden dotaz. Přemýšlím o tom displeji jak jsi mi dřív radil a zajímalo by mě, jestli by se na něm dalo zobrazit to co mám teď přes seriovou komunikaci (jaká běží aktuální část programu, časy atd.), abych měl přehled co zrovna Arduino dělá.
Díky
14.11.2016 v 22:20 #9213ÚčastníkOn kompilator obcas vypíše chybové hlášení, které není uplně přesně to co očekáváš. Prostš se dostane do slepé uličky a neví proč, tak zapíše poslední známé místo a chybu. Ve VBA je to ještě veselejší. Každá verze MS ACCESS má vlastní syntaxi a ty pak přemýšlíš, proč ti letitý kod najednounejde použít v této aplikaci … no to už je mimo téma.
LCD je super. Doporučuju 2 řády 16 znaků, protože je dostupný a realitvně levný.
Stačí si třeba v excelu udělat tabulku 2×16 a zkusti si vypsat jednotlivé možnosti a funkce. Resp. vymezit si prostor pro zobrazení a optimalizovat zprávy.
třeba místo „rozpenutí termostatu“ nechat na LCD zobrazit 1 nebo 0 pro jednotlivé funkce.
příklad
0123456789012345
0 DOHORENI 1 0 1 1
1 KVITANCE PORUCHYPrvních 8 znaků v prvním (0) řádku zálohovat pro aktuální proces.
Další 8 (2×4) nechat pro zobrazení stavu 4 hodnot (termostat kotle, prostorový, plamen, …)
Poslední řádek nechat na zprávy.Je to příklad nikoliv kuchařka. Promysli si co bys tam chtěl zobrazit a kouknem na to.
14.11.2016 v 22:36 #9214ÚčastníkAha, tak proto to vypsalo všechno možný a já z toho byl hotovej. Něco podobnýho se mi stalo, když jsem se po půl roce vrátil k mýmu (našemu) projektu regulace kotle a najednou mně to házelo jednu chybovou hlášku za druhou. Asi po dvou dnech trápení jsem odinstaloval a znova nainstaloval Arduino IDE a pak už to jelo. Myslím že to bylo nakopnutý výroční aktualizací Windows.
Displej rozmyslím a ozvu se. Zatím díky a promiň že potřebuju všechno vysvětlit, když mně něco nejde tak musím zjistit kde jsem udělal chybu.
14.11.2016 v 23:11 #9215ÚčastníkJASNĚ V POHO … 🙂
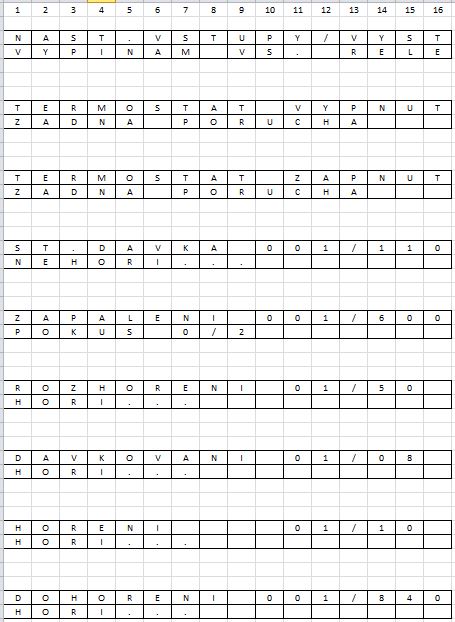
15.11.2016 v 22:41 #9232ÚčastníkDisplej jsem objednal podle doporučení (vzal jsem rovnou celej schield s tlačítky-možná se budou ještě hodit pro nastavování funkcí/časů) a trochu jsem přemejšlel o tom zobrazování a viděl bych to asi tak jako na obrázku. Na prvním řádku vždy aktuální proces, za ním čas a na druhým doplňkový informace. Bylo by to tak možný?
Attachments:
13.12.2016 v 22:17 #9534ÚčastníkAhoj, tak jsem se pustil do toho dipleje, něco jsem naštudoval, něco vyzkoušel. Teď se to snažím nacpat do mýho projektu, ale nějak se mi to nedaří. Zkusíš mi na to prosím kouknout? Zatím jsem jenom nastavil do setupu hlášku „nastavuji vstupy/vystupy“ (to funguje) a pak jsem zkoušel dát do loopu fotobuňku a do vypniVse „vypinam vsechny rele“, ale tam už se mi to nedaří.
Tady je aktuálmí kód:// REGULACE PELETKOVEHO KOTLE // author. Johnyhol & by JP // v 13_12_2016 // changelog // v 13_12_2016 // testovani displeje // v 13_11_2016 // zrusena reakce na prostorovy termostat -> není potreba, reseno jiz v kotli // v 10_11_2016 // uprava seriove komunikace -> pridani casovacu jednotlivych funkci // v 5_11_2016 // zmena casu - upraveno pro realny provoz // v 4_11_2016 // zmena vsech vystupu na rele // v 14_5_2016 // precislovani pinu // zmena funkce fotobunky z digitalu na analog // dolpneni seriove komunikace o hodnotu fotobunky // v 30_3_2016 // oprava funkce tlacitka kvitace poruchy -> HIGH->LOW // umazani parametru "long cas=13000;" -> jiz neni potreba // umazani parametru "//delay(84000); //pockej 84s" u funkce dohoreni -> jiz neni potreba // umazani parametru "//delay(12000); //po dobu 12s" u funkce davkovani zapalovaci davky pelet -> jiz neni potreba // umazani parametru "//if(digitalRead(prostorovyTermostat) == LOW || digitalRead(kotlovyTermostat) == LOW){ // prostorovy nebo kotlovy termostat vypne" u funkce zapaleni // drobne upravy textu/popisu jednotlivych parametru/funkci // v 27_3_2016 // uprava procesu zapalovani - nebude reagovat na prostorovy termostat // uprava dlouhych delayu na smycky, pro vyuziti watchdogu - autoreset pri zaseknuti procesou - doba nez se resetuje = 8s // nastaveni definice poruch pro pozdejsi vyuziti // v22_3_2016 // uprava ladicich textu pro termostaty // v21_3_2016 // presunuti testuPlamene pouze do smycky udrzuj horeni // doplneni textu do testu horeni // oprava textu zprav // zruseni diakritiky // zapnuti alarmu pri vyskytu poruchy // v20_3_2016 // slouceni podminenych funkci // vypnuti zhaveni pri rozepnuti termostatu (kotlovy nebo prostorovy) // rozdeleni funkci do vlastnich funkcnich bloku // zapojeni seriove komunikace pro odladeni funkci // v16_3_2016 // uprava podminky smycek (zruseno =) // posun zpozdeni 5s z procesu zapaleni na jeho konec // doplnena podminka reakce na termostaty (kotlovy/prostorovy) v procesu zapaleni // upravena doba na 1 zapalovaci proces - nastavitelna trimrem na analog.vstupu A0. v rozsahu 60 - 600 s = 1 - 10 min. - nastaveni pouze v dobe necinosti kotle // nastaveni poruchy a jeji kvitance tlacitkem na pinu 9 // definice poruch // bit funkce // 0 prehrati kotle pri zapalovani // 1 ztrata plamene pri horeni // 2 volne // 3 volne // 4 volne // 5 volne // 6 volne // 7 volne // knihovna watchdogu #include <avr/wdt.h> // knihovna displeje #include <LiquidCrystal.h> // nastaveni pinu displeje LiquidCrystal lcd(8, 9, 4, 5, 6, 7); #define davkovaniPelet 2 //davkovani pelet snek #define spirala 3 //zapalovaci spirala #define ventilator 5 //ventilator #define alarm 6 //signalizace poruchy #define kotlovyTermostat 8 //kotlovy termostat #define fotobunka 15 //fotobunka pro kontrolu plamene DI15 = A1 pro arduino UNO #define trimr1 14 // nastaveni doby zapaleni DI14 = A0 pro arduino UNO #define tlacitkoKvitance 9 // pin tlacitka kvitance poruchy int smycka1 = 0; // pomocna smycka - zapaleni int smycka1max = 600; // max.pomocne smycky - ted jiz nastavitelne trimrem na A0 60-600s int smycka2 = 0; // pomocna smycka - udrzeni horeni int smycka2max = 2; // max.pomocne smycky int smycka3 = 0; // pomocna smycka - pocet pokusu o zapaleni int smycka3max = 2; // max.pomocne smycky int smycka4 = 0; // pomocna smycka - davkovani zapalne davky pelet int smycka4max = 10; // max.pomocne smycky int smycka5 = 0; // pomocna smycka - rozhoreni int smycka5max = 5; // max.pomocne smycky int smycka6 = 0; // pomocna smycka - dohoreni int smycka6max = 84; // max.pomocne smycky byte porucha = 0; // promenna pro zaznam poruchy int ldr = 1; //analogovy pin kde je pripojen fotorezistor int ldr_value = 0; //promenna pro zaznam hodnot z fotorezistoru void setup() { // nastav seriovou komunikaci na rychlost 9600 bd Serial.begin(9600); Serial.println("Nastavuji vstupy/vystupy"); // ladici seriova komunikace // nastaveni displeje lcd.begin(16, 2); // zobrazeni na displeji lcd.print("NAST.VSTUPY/VYST"); delay (5000); // smaze displej pred dalsi smyckou lcd.clear(); pinMode(davkovaniPelet, OUTPUT); pinMode(spirala, OUTPUT); pinMode(ventilator, OUTPUT); pinMode(alarm, OUTPUT); pinMode(kotlovyTermostat, INPUT); pinMode(fotobunka, INPUT); pinMode(trimr1, INPUT); pinMode(tlacitkoKvitance, INPUT); // vsechno vypni vypniVse(); // nastav watchdog na 8s wdt_enable(WDTO_8S); } void loop() { wdt_reset(); // resetuj watchdog ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince // (poznamka: oznaceni 1 je druhy radek, prvni radek je 0): lcd.setCursor(0, 1); // zobrazeni na displeji lcd.print("FOTOBUNKA"); // smaze displej pred dalsi smyckou lcd.clear(); Serial.println("Cekam na sepnuti termostatu ..."); // ladici seriova komunikace smycka1max = map(analogRead(trimr1), 0, 1024, 60, 600); // nastaveni doby zapaleni trimrem na A0 if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty Serial.println("Kotlovy termostat zapnut"); // ladici seriova komunikace // startovaci davka pelet //------------------------ zapalovaciDavkaPelet(); // proces zapaleni //---------------- zapaleni(); // test poruchy // ----------------- //testPlamene(); // udrzeni horeni //-------------- udrzujHoreni(); // dohoreni //--------- dohoreni(); } else { Serial.println("Kotlovy/Prostorovy termostat vypnut"); // ladici seriova komunikace } // kvitence pripadne poruchy //------------------------------- kvitancePoruchy(); } void vypniVse() { // funkce vypni vse Serial.println("Vypinam vsechny rele ..."); // ladici seriova komunikace // (poznamka: oznaceni 1 je druhy radek, prvni radek je 0): lcd.setCursor(0, 1); // zobrazeni na displeji lcd.print("VYPINAM VS. RELE"); // smaze displej pred dalsi smyckou lcd.clear(); digitalWrite(davkovaniPelet, HIGH); //vypni davkovani digitalWrite(spirala, HIGH); //vypni zhaveni digitalWrite(ventilator, HIGH); //vypni ventilator } void zapalovaciDavkaPelet() { // prvotni davkovani pelet pro zapaleni Serial.println("Davkuji pelety pro zapaleni ... 110s"); // ladici seriova komunikace digitalWrite(davkovaniPelet, LOW); //davkuj pelety for (smycka4 = 0; smycka4 < smycka4max; smycka4 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka4); Serial.print("s/"); Serial.print(smycka4max); Serial.println("s "); } digitalWrite(davkovaniPelet, HIGH); //potom vypni davkovani digitalWrite(ventilator, LOW); //zapni ventilator digitalWrite(spirala, LOW); //zapni zhaveni } void zapaleni() { // funkce zapaleni pelet // 2 pokusy o zapaleni Serial.println("Spoustim zapaleni ..."); // ladici seriova komunikace for (smycka3 = 0; smycka3 < smycka3max; smycka3 ++){ // smycka "1-10" minut zapalovani for (smycka1 = 0; smycka1 < smycka1max; smycka1 ++){ wdt_reset(); // resetuj watchdog Serial.print("Pokus o zapaleni "); // ladici seriova komunikace Serial.print(smycka3); // ladici seriova komunikace Serial.print("/"); // ladici seriova komunikace Serial.println(smycka3max); // ladici seriova komunikace Serial.print("Stav: "); // ladici seriova komunikace Serial.print(smycka1); // ladici seriova komunikace Serial.print("s/"); // ladici seriova komunikace Serial.print(smycka1max); // ladici seriova komunikace Serial.println("s "); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == LOW){ // kotlovy termostat vypne digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println("Rozepnuti termostatu ..."); // ladici seriova komunikace bitSet(porucha,0); // nastav poruchu bit c.0 na "1" } if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println(" hori ..."); // ladici seriova komunikace Serial.println("Rozhoreni ... 50s "); } else { Serial.println(" nehori ..."); // ladici seriova komunikace } delay(1000); } for (smycka5 = 0; smycka5 < smycka5max; smycka5 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka5); Serial.print("s/"); Serial.print(smycka5max); Serial.println("s "); } //delay(5000); //cekej 5s } } void udrzujHoreni() { // funkce udrzeni horeni ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Udrzeni horeni ..."); // ladici seriova komunikace for (smycka2 = 0; smycka2 < smycka2max; smycka2 ++){ wdt_reset(); // resetuj watchdog smycka2 = 0; // vynuluj smycku if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen Serial.println("Test plamene ... hori"); // ladici seriova komunikace Serial.println("Davkuji pelety ... "); digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog //Serial.print("s/"); //Serial.print(davkovaniPelet, LOW); //Serial.print("s "); Serial.println("Pauza ... "); digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog } else { delay(1000); // pocekej jeste 1s a zkus to znovu if(analogRead(fotobunka) >= 500){ //pokud fotobunka nevidi plamen Serial.println("Test plamene ... porucha"); // ladici seriova komunikace smycka2 = smycka2max; // ukonci smycku //porucha = 1; // nastav poruchu bitSet(porucha,1); // nastav poruchu bit c.1 na "1" digitalWrite(alarm, LOW); // zapni alarm } } } else { smycka2 = smycka2max; // ukonci smycku } } } void dohoreni() { // funkce dohoreni Serial.println("Dohoreni ... 840s "); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani pelet digitalWrite(spirala, HIGH); //vypni zhaveni - pro jistotu for (smycka6 = 0; smycka6 < smycka6max; smycka6 ++){ Serial.print("Stav: "); Serial.print(smycka6); Serial.print("s/"); Serial.print(smycka6max); Serial.println("s "); delay(1000); wdt_reset(); // resetuj watchdog } digitalWrite(ventilator, HIGH); //vypni ventilator } void kvitancePoruchy() { // funkce kvitance poruchy if(porucha > 0 ){ // kdyz je porucha aktivni Serial.println("Kvitance poruchy ..."); // ladici seriova komunikace // vypni vse vypniVse(); while (digitalRead(tlacitkoKvitance) == LOW) { // zapni alarm a cekej na stisk tlacitka digitalWrite(alarm, LOW); // zapni alarm Serial.println("Porucha ... cekam na kvitanci"); // ladici seriova komunikace wdt_reset(); // resetuj watchdog } Serial.println("Porucha kvitovana ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm porucha = 0; // vynuluj poruchu } else { // jinak Serial.println("Zadna porucha ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm } }Díky moc!
14.12.2016 v 8:26 #9537Účastníkahoj,
chybka je jasná:
– nejdřív musíš smazat LCD
– pak nastavit kurzor
– nakonec vypsat textteď to máš takto:
lcd.setCursor(0, 1); // zobrazeni na displeji lcd.print("FOTOBUNKA"); // smaze displej pred dalsi smyckou lcd.clear();správně to má být takto:
// smaze displej lcd.clear(); // nastaveni kurzoru lcd.setCursor(0, 1); // zobrazeni na displeji lcd.print("FOTOBUNKA");14.12.2016 v 16:06 #9538ÚčastníkAhoj, díky za rychlou reakci. Zkoušel jsem to jak radíš, ale stejně to nic nezobrazí, pořád funguje jenom „nastavuji vstupy/vystupy“ a pak už nic. Když to zkusím v extra projektu (jenom displej bez ostatních funkcí) tak to funguje. Ještě musí bejt někde něco.
14.12.2016 v 22:25 #9541Účastníkhod sem poslední kod včetně tech uprav lcd odemně
15.12.2016 v 7:39 #9551ÚčastníkTak tady:
// REGULACE PELETKOVEHO KOTLE // author. Johnyhol & by JP // v 13_12_2016 // changelog // v 13_12_2016 // testovani displeje // v 13_11_2016 // zrusena reakce na prostorovy termostat -> není potreba, reseno jiz v kotli // v 10_11_2016 // uprava seriove komunikace -> pridani casovacu jednotlivych funkci // v 5_11_2016 // zmena casu - upraveno pro realny provoz // v 4_11_2016 // zmena vsech vystupu na rele // v 14_5_2016 // precislovani pinu // zmena funkce fotobunky z digitalu na analog // dolpneni seriove komunikace o hodnotu fotobunky // v 30_3_2016 // oprava funkce tlacitka kvitace poruchy -> HIGH->LOW // umazani parametru "long cas=13000;" -> jiz neni potreba // umazani parametru "//delay(84000); //pockej 84s" u funkce dohoreni -> jiz neni potreba // umazani parametru "//delay(12000); //po dobu 12s" u funkce davkovani zapalovaci davky pelet -> jiz neni potreba // umazani parametru "//if(digitalRead(prostorovyTermostat) == LOW || digitalRead(kotlovyTermostat) == LOW){ // prostorovy nebo kotlovy termostat vypne" u funkce zapaleni // drobne upravy textu/popisu jednotlivych parametru/funkci // v 27_3_2016 // uprava procesu zapalovani - nebude reagovat na prostorovy termostat // uprava dlouhych delayu na smycky, pro vyuziti watchdogu - autoreset pri zaseknuti procesou - doba nez se resetuje = 8s // nastaveni definice poruch pro pozdejsi vyuziti // v22_3_2016 // uprava ladicich textu pro termostaty // v21_3_2016 // presunuti testuPlamene pouze do smycky udrzuj horeni // doplneni textu do testu horeni // oprava textu zprav // zruseni diakritiky // zapnuti alarmu pri vyskytu poruchy // v20_3_2016 // slouceni podminenych funkci // vypnuti zhaveni pri rozepnuti termostatu (kotlovy nebo prostorovy) // rozdeleni funkci do vlastnich funkcnich bloku // zapojeni seriove komunikace pro odladeni funkci // v16_3_2016 // uprava podminky smycek (zruseno =) // posun zpozdeni 5s z procesu zapaleni na jeho konec // doplnena podminka reakce na termostaty (kotlovy/prostorovy) v procesu zapaleni // upravena doba na 1 zapalovaci proces - nastavitelna trimrem na analog.vstupu A0. v rozsahu 60 - 600 s = 1 - 10 min. - nastaveni pouze v dobe necinosti kotle // nastaveni poruchy a jeji kvitance tlacitkem na pinu 9 // definice poruch // bit funkce // 0 prehrati kotle pri zapalovani // 1 ztrata plamene pri horeni // 2 volne // 3 volne // 4 volne // 5 volne // 6 volne // 7 volne // knihovna watchdogu #include <avr/wdt.h> // knihovna displeje #include <LiquidCrystal.h> // nastaveni pinu displeje LiquidCrystal lcd(8, 9, 4, 5, 6, 7); #define davkovaniPelet 2 //davkovani pelet snek #define spirala 3 //zapalovaci spirala #define ventilator 5 //ventilator #define alarm 6 //signalizace poruchy #define kotlovyTermostat 8 //kotlovy termostat #define fotobunka 15 //fotobunka pro kontrolu plamene DI15 = A1 pro arduino UNO #define trimr1 14 // nastaveni doby zapaleni DI14 = A0 pro arduino UNO #define tlacitkoKvitance 9 // pin tlacitka kvitance poruchy int smycka1 = 0; // pomocna smycka - zapaleni int smycka1max = 600; // max.pomocne smycky - ted jiz nastavitelne trimrem na A0 60-600s int smycka2 = 0; // pomocna smycka - udrzeni horeni int smycka2max = 2; // max.pomocne smycky int smycka3 = 0; // pomocna smycka - pocet pokusu o zapaleni int smycka3max = 2; // max.pomocne smycky int smycka4 = 0; // pomocna smycka - davkovani zapalne davky pelet int smycka4max = 10; // max.pomocne smycky int smycka5 = 0; // pomocna smycka - rozhoreni int smycka5max = 5; // max.pomocne smycky int smycka6 = 0; // pomocna smycka - dohoreni int smycka6max = 84; // max.pomocne smycky byte porucha = 0; // promenna pro zaznam poruchy int ldr = 1; //analogovy pin kde je pripojen fotorezistor int ldr_value = 0; //promenna pro zaznam hodnot z fotorezistoru void setup() { // nastav seriovou komunikaci na rychlost 9600 bd Serial.begin(9600); Serial.println("Nastavuji vstupy/vystupy"); // ladici seriova komunikace // nastaveni displeje lcd.begin(16, 2); // zobrazeni na displeji lcd.print("NAST.VSTUPY/VYST"); //delay (5000); // smaze displej pred dalsi smyckou //lcd.clear(); pinMode(davkovaniPelet, OUTPUT); pinMode(spirala, OUTPUT); pinMode(ventilator, OUTPUT); pinMode(alarm, OUTPUT); pinMode(kotlovyTermostat, INPUT); pinMode(fotobunka, INPUT); pinMode(trimr1, INPUT); pinMode(tlacitkoKvitance, INPUT); // vsechno vypni vypniVse(); // nastav watchdog na 8s wdt_enable(WDTO_8S); } void loop() { wdt_reset(); // resetuj watchdog ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince // smaze displej pred dalsi smyckou lcd.clear(); // (poznamka: oznaceni 1 je druhy radek, prvni radek je 0): lcd.setCursor(0, 1); // zobrazeni na displeji lcd.print("FOTOBUNKA"); Serial.println("Cekam na sepnuti termostatu ..."); // ladici seriova komunikace smycka1max = map(analogRead(trimr1), 0, 1024, 60, 600); // nastaveni doby zapaleni trimrem na A0 if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty Serial.println("Kotlovy termostat zapnut"); // ladici seriova komunikace // startovaci davka pelet //------------------------ zapalovaciDavkaPelet(); // proces zapaleni //---------------- zapaleni(); // test poruchy // ----------------- //testPlamene(); // udrzeni horeni //-------------- udrzujHoreni(); // dohoreni //--------- dohoreni(); } else { Serial.println("Kotlovy/Prostorovy termostat vypnut"); // ladici seriova komunikace } // kvitence pripadne poruchy //------------------------------- kvitancePoruchy(); } void vypniVse() { // funkce vypni vse Serial.println("Vypinam vsechny rele ..."); // ladici seriova komunikace // smaze displej pred dalsi smyckou lcd.clear(); // (poznamka: oznaceni 1 je druhy radek, prvni radek je 0): lcd.setCursor(0, 1); // zobrazeni na displeji lcd.print("VYPINAM VS. RELE"); digitalWrite(davkovaniPelet, HIGH); //vypni davkovani digitalWrite(spirala, HIGH); //vypni zhaveni digitalWrite(ventilator, HIGH); //vypni ventilator } void zapalovaciDavkaPelet() { // prvotni davkovani pelet pro zapaleni Serial.println("Davkuji pelety pro zapaleni ... 110s"); // ladici seriova komunikace digitalWrite(davkovaniPelet, LOW); //davkuj pelety for (smycka4 = 0; smycka4 < smycka4max; smycka4 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka4); Serial.print("s/"); Serial.print(smycka4max); Serial.println("s "); } digitalWrite(davkovaniPelet, HIGH); //potom vypni davkovani digitalWrite(ventilator, LOW); //zapni ventilator digitalWrite(spirala, LOW); //zapni zhaveni } void zapaleni() { // funkce zapaleni pelet // 2 pokusy o zapaleni Serial.println("Spoustim zapaleni ..."); // ladici seriova komunikace for (smycka3 = 0; smycka3 < smycka3max; smycka3 ++){ // smycka "1-10" minut zapalovani for (smycka1 = 0; smycka1 < smycka1max; smycka1 ++){ wdt_reset(); // resetuj watchdog Serial.print("Pokus o zapaleni "); // ladici seriova komunikace Serial.print(smycka3); // ladici seriova komunikace Serial.print("/"); // ladici seriova komunikace Serial.println(smycka3max); // ladici seriova komunikace Serial.print("Stav: "); // ladici seriova komunikace Serial.print(smycka1); // ladici seriova komunikace Serial.print("s/"); // ladici seriova komunikace Serial.print(smycka1max); // ladici seriova komunikace Serial.println("s "); // ladici seriova komunikace if(digitalRead(kotlovyTermostat) == LOW){ // kotlovy termostat vypne digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println("Rozepnuti termostatu ..."); // ladici seriova komunikace bitSet(porucha,0); // nastav poruchu bit c.0 na "1" } if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen digitalWrite(spirala, HIGH); //vypni zhaveni smycka1 = smycka1max; // ukonci smycku1 smycka3 = smycka3max; // ukonci smycku3 Serial.println(" hori ..."); // ladici seriova komunikace Serial.println("Rozhoreni ... 50s "); } else { Serial.println(" nehori ..."); // ladici seriova komunikace } delay(1000); } for (smycka5 = 0; smycka5 < smycka5max; smycka5 ++){ delay(1000); wdt_reset(); // resetuj watchdog Serial.print("Stav: "); Serial.print(smycka5); Serial.print("s/"); Serial.print(smycka5max); Serial.println("s "); } //delay(5000); //cekej 5s } } void udrzujHoreni() { // funkce udrzeni horeni ldr_value = analogRead(ldr); //čte hodnoty LDR Serial.print("HODNOTA FOTOBUNKY = "); Serial.println(ldr_value); //zobrazí hodnoty LDR na seriove lince Serial.println("Udrzeni horeni ..."); // ladici seriova komunikace for (smycka2 = 0; smycka2 < smycka2max; smycka2 ++){ wdt_reset(); // resetuj watchdog smycka2 = 0; // vynuluj smycku if(digitalRead(kotlovyTermostat) == HIGH){ // kotlovy termostat je zapnuty if(analogRead(fotobunka) <= 500){ //pokud fotobunka vidi plamen Serial.println("Test plamene ... hori"); // ladici seriova komunikace Serial.println("Davkuji pelety ... "); digitalWrite(davkovaniPelet, LOW); //davkuj pelety delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog delay(4000); //pockej 4s wdt_reset(); // resetuj watchdog //Serial.print("s/"); //Serial.print(davkovaniPelet, LOW); //Serial.print("s "); Serial.println("Pauza ... "); digitalWrite(davkovaniPelet, HIGH); //vypni davkovani delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog delay(5000); //pockej 5s wdt_reset(); // resetuj watchdog } else { delay(1000); // pocekej jeste 1s a zkus to znovu if(analogRead(fotobunka) >= 500){ //pokud fotobunka nevidi plamen Serial.println("Test plamene ... porucha"); // ladici seriova komunikace smycka2 = smycka2max; // ukonci smycku //porucha = 1; // nastav poruchu bitSet(porucha,1); // nastav poruchu bit c.1 na "1" digitalWrite(alarm, LOW); // zapni alarm } } } else { smycka2 = smycka2max; // ukonci smycku } } } void dohoreni() { // funkce dohoreni Serial.println("Dohoreni ... 840s "); // ladici seriova komunikace digitalWrite(davkovaniPelet, HIGH); //vypni davkovani pelet digitalWrite(spirala, HIGH); //vypni zhaveni - pro jistotu for (smycka6 = 0; smycka6 < smycka6max; smycka6 ++){ Serial.print("Stav: "); Serial.print(smycka6); Serial.print("s/"); Serial.print(smycka6max); Serial.println("s "); delay(1000); wdt_reset(); // resetuj watchdog } digitalWrite(ventilator, HIGH); //vypni ventilator } void kvitancePoruchy() { // funkce kvitance poruchy if(porucha > 0 ){ // kdyz je porucha aktivni Serial.println("Kvitance poruchy ..."); // ladici seriova komunikace // vypni vse vypniVse(); while (digitalRead(tlacitkoKvitance) == LOW) { // zapni alarm a cekej na stisk tlacitka digitalWrite(alarm, LOW); // zapni alarm Serial.println("Porucha ... cekam na kvitanci"); // ladici seriova komunikace wdt_reset(); // resetuj watchdog } Serial.println("Porucha kvitovana ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm porucha = 0; // vynuluj poruchu } else { // jinak Serial.println("Zadna porucha ..."); // ladici seriova komunikace digitalWrite(alarm, HIGH); // vypni alarm } }15.12.2016 v 10:54 #9552Účastníkpředpokládám, že se ti ve smyčce nic nezobrazuje a zobrazí se tit o až op sepnutí termostatu. („FOTOBUNKA“).
Vidím tu problém ten, že ve smyčce LOOP() není žádná prodleva pro LCD a tak když se nic nedej neustále se maže a zobrazuje LCD.
Vidím 3 řešení:
1, misto
lcd.print("FOTOBUNKA");
dejlcd.print("FOTOBUNKA"); delay(500);2, nedavej lcd.clear() ale zapisuj texty tak dlouhe aby přepsal všechny znaky v řádku
3, místo sáhodlouhých popisků procesu použij ikony. Může na LCD uědlat až 15 vlastních znaků. ty můžeš dát jako reakce na nějákou funkci. Příklad 1. ikona bude plamen. dáme jí pozici 0,1. Když bude fotobuńka vidět plamen zobrazí v té pozici 1. ikonu, když né zapíše do této pozice mezeru. Cílem je nemazat LCD, ale neustále jej přepisovat. pro pozici 0,3 dámetřeba hvězdičku (nemusíš psát, máš již ve znakové sadě). Když bude zapalovat pelety, objeví se v této pozioci hvězdička jinak mezera ,….
jak s tím začít by to moholo pomoci toto:
https://omerk.github.io/lcdchargen/nechám výběr na tobě … .
15.12.2016 v 12:01 #9553Luke_CZ
Účastník1, a co raději vyhodnocovat, zda ke změně stavu došlo? Tedy jednoduše dát globální boolean proměnnou (výchozí FALSE), pokud dojde ke změně stavu, pak nastavit tuto proměnnou na TRUE (přímo ve proceduře). V případě, že je proměnná TRUE tak změnit text na LCD a nastavit proměnnou zpět na FALSE, pokud je FALSE, tak nic na displeji neměnit.
Tedy přepisovat jen tehdy, kdy je potřeba a co je potřeba.
Delay je sice řešení, ale takové kostrbaté, navíc delay v tomto případě jen brzdí běh programu.
2, lze jen souhlasit, navíc jde, pokud použiješ char jako pole, krásně text zarovnat na střed displeje, je to opticky mnohem výraznější, než vše psát od kraje.
Jen malé doporučení: Texty vypisuj na LCD přes makro F(), ušetříš si SRAM
3, na LCD lze udělat pouze 8 vlastních znaků pro jedno zobrazení(TO posjirka: ty umíš víc?). Nic proti ikonám, ale na rastru 5×7 moc zázraků nepředvedeš.L.
15.12.2016 v 13:45 #9556Účastníkmáš pravdu … tech vlastních znamků je max 8 (0-7).
Delay taky nemám rád, ale tady mi přišel jako vhodný, protože celý kod je vlastně jen odkrokovaná smyčka s krokem po jednotlivých funkcích. Tady by se změna detekovala celkem neprakticky. Jedině stejně jako je chybový registr tak zavést stavový, ten měnit a regaovat na něj při zobrazení.
ve výsledku bys v každémkroku (někdy i vícekrát) volal pod funkci na změnu zobrazení.
Osobně bych šel do vlastních znaků. 8 ikon v pohodě stačí. Zobrazoval by se jen stav jaký je požadován + některé hodnoty proměnných .
rozhodnutí ale nechávám na johnyhola .. přeji jen je to jeho zařízení. -
AutorPříspěvky
{kind=link}
- Pro reakci na toto téma se musíte přihlásit.