posjirka
Vytvořené odpovědi
-
AutorPříspěvky
-
Vojtěch Vosáhlo
ÚčastníkS tím můžu jenom souhlasit, pokud jste s tím moc nedělal tak je to nejlepší řešení. Budu vám držet palce. Kdykoliv se sem můžete obrátit.
jpokorny12
ÚčastníkZdravím
Tak nějak jsem udělal schema a zkoušel jsem to. Ale když vystupy z filtru připojím na arduino, tak i když tam není žádný signál, tak pořád je tam hodnota kolem (400)? Nevadí, když ty filtry a OZ napájím jiným zdrojem (25V), ale společnou zem mají.
Nevíte co s tím? Nebomám zkusit dát do cesty kondenzátor? DěkujiTady je schema
Schemamystriks
Účastníktak jsem se do toho trochu zamotal, asi bych to viděl momentálně takhle:
koupím arduino Mega 2560
2.8″ Inch TFT LCD Display Touch Screen
Arduino Sensor Shield
servo 3x
teplotni cidla
Four 4 Channel Relay Module
vyzkoušel bych to nejdřív zapojit napřímo abych se s tim seznámil a zkusil naprogramovat lcd, až bych tohle zvládnul tak bych dokoupil Attiny85
ÚčastníkMimochodem při delších drátových rozvodech pak musíte pracovat i s odporem a kapacitou drátu. Třeba článek zde vše popisuje, kdyby jste se rozhodl jít pro 1wire:
A oprava, na 1wire zběrnici není úplně daný limit, je to dané právě kapacitou a délkami drátů.
ÚčastníkuC jsem myslel mikroprocesor, něco jako Attiny13/45/85…
Kdybyste šel tou cestou která se jednoduše rozšiřuje, stačilo by do všech místností natáhnout trojlinku – 1. Země 2. Napájení 3. Komunikace (např. ten onewire)Na tuto „síť“ by pak mohlo být připojeno prakticky cokoliv co přes 1wire komunikuje. Tady je ale problém že servo na 1W nepřipojíte…
Tím pádem by se musel do hry přidat právě nějaký mikroprocesor. I Attiny13 (asi 20Kč za kus v ČR) by mělo stačit kdyby vám nevadilo psát v C.
Takže by se vytvořila taková senzorová jednotka.
[Teploměr, servo atd. <—–> uC(konverze z/na 1W) ]<–trojlinka natažená pokoji–> hlavní uC
Kdyby jste pak měl nataženou trojlinku stačí na ní jen „napíchat“ všechna zařízení. To označené [ ] je vaše zařízení které bude připíchnuté na trojlince.
Například dallas (to je snad maxim?) prodává čipy co dělají přímou konverzi I/O na onewire takže k tomu zapojíte třeba tlačítko, píchnete na trojlinku a najednou máte spínač připojený k celému systému.
Pokud vím tak max počet zařízení je 255.Rozhodně se vyplatí vytvořit něco rozšiřitelného pokud plánujete cokoliv přidávat.
ÚčastníkJestli jsem to dobre pochopil tak to mohu zapojit normalne jen do kazde mistnosti privest o jeden drat navic pro 1wire komunikaci, pro pripadne rozsireni napr. o vlhkostni cidla
ÚčastníkCasem az budou penize bych tam chtel dodelat rekuperaci. Kabely budou tazene v sadrokartonovem podhledu takze nebude problem je kdykoliv predelat. uC je co?
ÚčastníkDůležitá věc u něčeho takového je rozšiřitelnost. Vy vlastně natáhnete tolik kabelů kolik máte serv. Pokud jste si 100% jistý že to takhle zůstane, je to nejlepší řešení, a nejjednodušší. Pokud by ale byla šance že budete někdy chtít něco přidat, mohl byste mít nouzi o kabely… Tady by poté bylo nejlepší mít u každého serva/senzoru uC který by vše sjednocoval na jednu datovou linku, třeba 1wire. Na to můžete pak přidávat zařízení prakticky bez omezení. Je to jen něco nad čím se zamyslet.
ÚčastníkBudou natazene kabely. Aby to nebylo zbytecne slozite. V podstate mi jde o to aby pri teplote 23 stupnu byli klapky zavrene a pri 20 otevrene napul. Vetrak by se mel pri 35 stupnich zapnout na 30 procent a pri 90 st. Na 100%. A aby se ty teploty dali na lcd nastavit
krcmar.tomas@gmail.com
Účastníkjezis to je parada ! lehce jsem si s tim pohrala vypada to funkcne
diky moc !!!!
Aleš
ÚčastníkNevím, jestli se v tom někdo vyzná. Naházel jsem tam jenom součástky, a nijak to neupravoval.
https://circuits.io/circuits/3818226-power-supplyÚčastníkMůžu vědět jak budete se sonzory a servy komunikovat?
Kabel/bezdrátově, protokly…Účastníkmohl bych poprosit o screen z circuits nebo to myslim jde nasdilet
diky TH
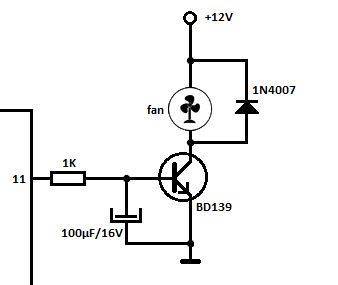
ÚčastníkTak jsem si zkoušel na circuits.io nasimulovat to první schéma s jedním tranzistorem, a jak jsem předpokládal, nefunguje. Ani se zátěží na výstupu. Zkusil jsem tedy jiné schéma, a to celkem funguje. Nedávno jsem ho použil k řízení PC ventilátoru Arduinem. Jenom je potřeba zmenšit kondenzátor z 10uF na 1uF. I průběh napětí je celkem lineární.
Attachments:
posjirka
Účastníkadd post https://bastlirna.hwkitchen.cz/forum/tema/ovladani-klapky-privodu-vzduchu/page/2/#post-10204
ty vstupy DI slouží pro připojeník arduinu, prostě 1 vystup připojíš na „0V“, 1 výstup na „2,4V“,… tím že je sepneš tak vlastně zkratuješ zenerovu diodu a tím pádem ovlivíš výsledné napětí proti zemi.add post https://bastlirna.hwkitchen.cz/forum/tema/ovladani-klapky-privodu-vzduchu/page/2/#post-10206
obávám se, že ti vstup 6 jde do zkratu.ÚčastníkHezkýý, a ukazuje to to, co má? Já to circuit.io snad budu muset také zkusit, co to umí 🙂
Účastníkmisto ir bych pouzil laserove ukazovatko. ma vetsi intenzitu a pujde lepe odstinit na slunci. na druhou stranu musi byt presne zamereno. wifi modul je fajn ale asi bych spis pouzil neco na 2.4ghz. moduly existuji a diky pridavne antene maji i dobry dosah.predpokladam ze logika bude takova ze start/cil je pouze vysilac informace a vse ostatni jsou autonomni prijimace. stejne bych to dal do 2 krabicek… start cil jedna …. display s pc druha.
Účastníkne ze by to neslo. muzes udelat to same co napr. cidla dallas ds18xxx . udelej treba 5 mereni a z toho prumer. trochu lepe programatorsky: vytvor pro mennou teplota. vynuluj ji a 5x pripocitec merenou teplotu. vysledek vydel 5 a je to.
Luke_CZ
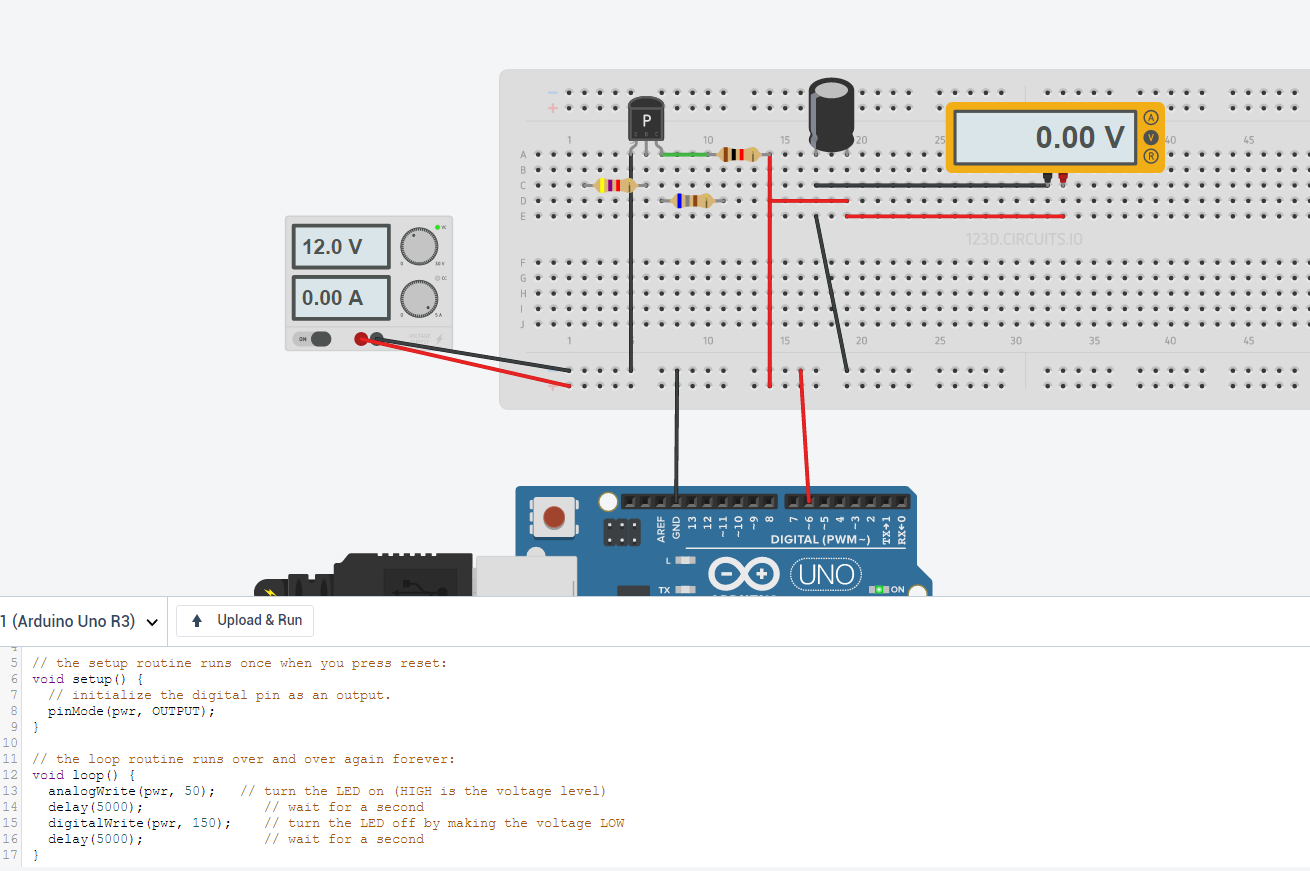
ÚčastníkÚčastníktak si tady hraju s circuit.io prijde mi to uzasny pro neznale, jako jsem ja
zkusil jsem nasimulovat to uplne prvni schema, mam to dobre, asi se bucete smat, ale ja mam opravdu znalosti ze zakladni skoly 🙁
Attachments:
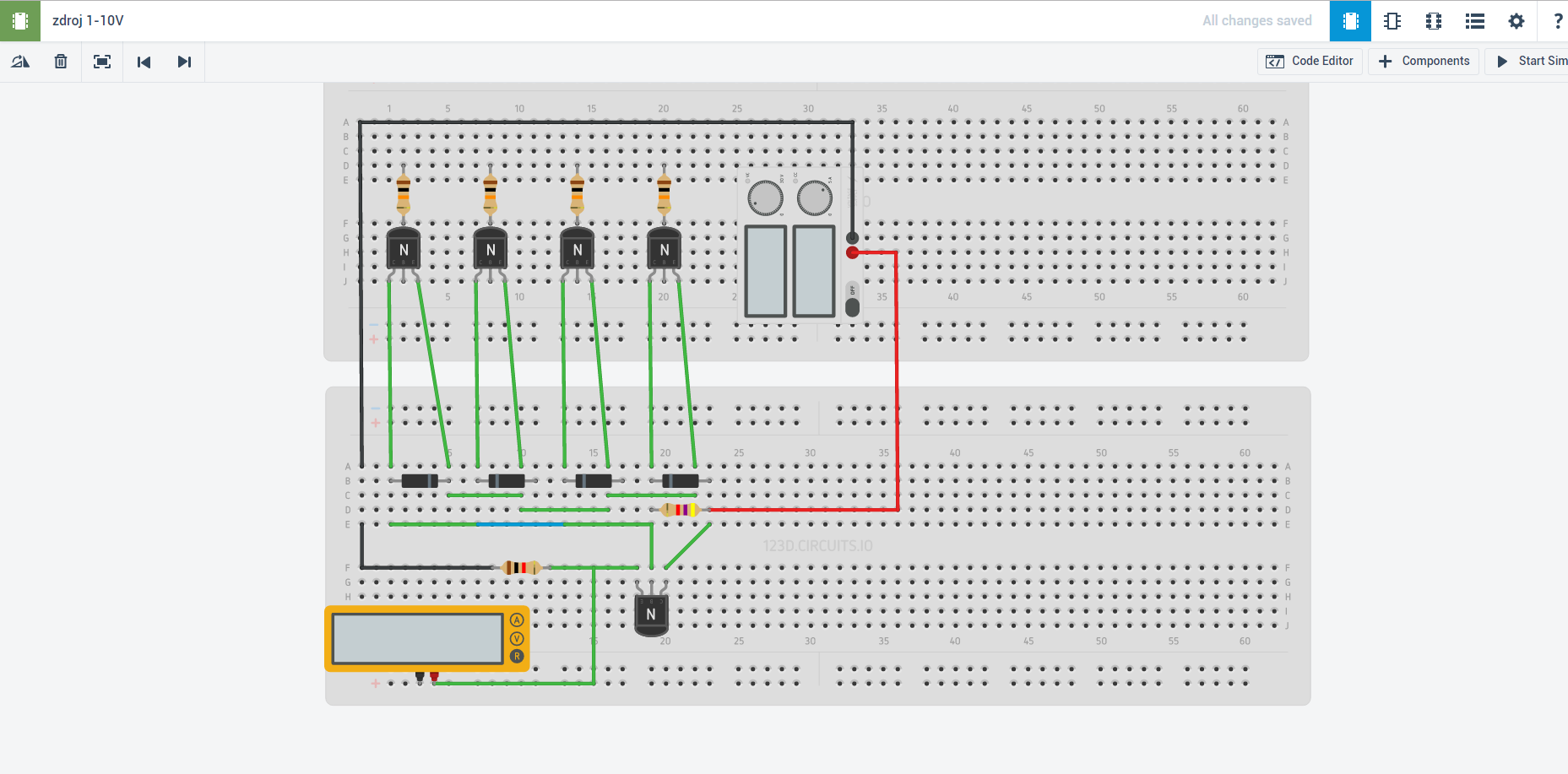
Účastníktak jsem objevil circuits.io
pro me jako pro lamu na slaboptoud, idealni
zusil jsem nasimuovat ten vas posledni navrh
mam jenom 2 dotazy
ty vodice Di s tim ‚nabuzenim‘ na 0, 2.4, 4.8, 7.2V chapu ze se pripoji na arduino jeste nevim kam, ale jak to nasimuluju v tom circuits.io ?
a vystup merim mezi tranzistorem Q4 a R6 ale proti cemu
omlouvam se za asi pro vs stupidni dotazy
ale ten simulator je super !!!
TH
Attachments:
Dzaraaa
ÚčastníkAno, nejspíše to tak bude. Také jak radíte – uvažuji o koupi nodeMCU, přesně tak bude to bez komplikací. Ale přeci bych chtěl toto řešení nějak využít když už jsem jej pořídil. Zkusím tedy naprogramovat arduino bez nasazeného shieldu a uvidím. Zatím děkuji Všem, kteří se účastnili diskuze 🙂
Zbyšek Voda
ÚčastníkŘešení: V době programování Arduina odpojit cokoliv, co je připojeno na piny RX a TX (0 a 1). Jak psal Dreamer.
Dreamer
ÚčastníkNo jestli myslíš ten problém popisovaný: 22.1.2017 (13:16) tak to IDE říká že nemůže komunikovat s UNO – tedy nemůže do něj nahrát program. Jak jsem psal výše nejspíš je to tím že jsou piny shieldu TX a RX propojeny s piny UNO. Pokud tomu tak je tak je to trochu nešťastné řešení. Konkrétně ale asi líp poradit nedokážu, tenhle konkrétní shield nemám a asi ani nikdo kdo se pokoušel ti odpovídat. Co konkrétně potřebuješ řešit? Možná by bylo lepší objednat třeba NodeMCU D1 mini. To se dá připojit přímo a programovat bez UNO a je tady určitě daleko známější.
ÚčastníkÁha… no jenomže mám ještě problém v tom viz předchozí text. Co s tím?
ÚčastníkArduino UNO nemá TX a RX vyvedené dvakrát. Pouze je má na desce připojeny na převodník a přes tyto piny se nahrává program. Po nahrání programu jsou volně přístupné ale většinou se nepoužívají právě proto že je používá převodník při nahrávání programu. Pravděpodobně je tedy používá ke komunikaci i tvůj WiFi shield. Pro nahrání programu jej tedy musíš sundat, po nahrání zase nasadit (Samozřejmě s odpojeným napájením).
ÚčastníkVěděl by někdo jak řešit? Děkuji.
darira
ÚčastníkDěkuji, pěkný článek. Pročtu a uvidím co z toho zvládnu použít. Ano, logika je 24V vs 0V.
ÚčastníkBlindP byl rychlejší 🙂
ÚčastníkDiavolino je jen další derivát Arduino UNO Pro.
klidně použij klasicé uno. verze PRO jsou bez převodníku USB ale ve výsledku zjistíš že dáš radši 25 kč navíc a můžeš to kdykoliv přeprogramovat přes USB než shanět ICSP programator.použij klasice uno nebo jeho klon.
-
AutorPříspěvky