
Soutěž CanSat – tým PILSAT #2

Obsah článku:
CanSat – finále ČR
V minulém příspěvku jsme představili projekt CanSat a také naše řešení projektu s Arduinem. V tomto článku se podíváme na finální technické řešení CanSatu PilSat, ale na začátku nejdříve na průběh samotného finále, které se konalo 30.-31.3.
Průběh finále
První den finále se konal na Letkově. Před odjezdem na Letkov jsme se sešli v Centru Robotiky a dokončovali jsme konečnou verzi našeho CanSatu. Kolem poledne se začali scházet ostatní týmy na předem ustanoveném místě v Plzni, odkud byl následný odjezd do Letkova. Po příjezdu do Letkova se vylosovalo pořadí týmů na vypuštění CanSatu. Náš tým PilSat byl vylosován jako třetí/čtvrtý v pořadí z osmi/devíti.

První pokus vypuštění našeho CanSatu se nepovedl, proto jsme museli vzlétnout dvakrát. Druhý pokus vypuštění CanSatu se nám už povedl, ale vyskytl se problém a řízené přistání selhalo.
Po vypuštění všech CanSatů jsme jeli zpátky do Centra Robotiky, kde jsme zpracovávali získaná data pro druhý den finále a připravovali se na prezentaci.
Náplní druhého dne finále byly prezentace týmů a výsledků z předchozího dne. Vše probíhalo před odbornou porotou a ostatními týmy. Po prezentacích a obědě jsme se dozvěděli výsledky. Náš tým PilSat se umístil na 5. místě a dostali jsme ocenění za inovativní řešení mise.
Technický popis našeho CanSatu
Náš CanSat byl rozdělen do dvou na sobě nezávislých elektronických obvodů. První byl určen pro samotné získávání dat v průběhu letu a druhý pak pro řízení letu (drona).
Obvod pro ovládání letu (drona)
Tento obvod nebyl nijak složitý, sestavili jsem ho z desky NAZE32. Tato deska je podobná Arduinu, ale své využití má hlavně pro stavbu dronů. Tato deska už má ve svém základu integrovaný barometr, gyroskop a akcelerometr, takže k vlastnímu letu už je pak jen třeba připojit motory s regulátory a napájecí destičku s baterkou. V našem případě jsme použili motory ROTORAMA s tahem 220 g, což pro náš CanSat mělo být dostačující. Jako napájení jsme použili baterii Li-Po 7,4 V s kapacitou 460 mAh, což nám mělo vystačit asi na 2 minuty letu při maximálním tahu.
Obvod pro získávání dat
Do obvodu pro získávání dat jsem použili Arduino MICRO, které mělo na starosti zaznamenávání dat a jejich odesílání do pozemní stanice. Data (teplotu a tlak) jsme získávali ze senzoru BMP180. Tato data jsme pak odvysílali v pásmu 433 MHz do pozemní stanice pomocí modulu RFM69HW. V pozemní stanci byla data přijata a pomocí Arduino UNO poslána přes sériovou linku do počítače. K výměně dat docházelo přibližně jedenkrát za sekundu.
Zpracování dat
Data, která jsme přijali, jsme museli zpracovat a odevzdat porotě. Ze získaných dat jsme měli za úkol zjistit výšku shozu. Náš výpočet bral v úvahu jak tlak, tak i teplotu. Díky tomuto vztahu se nám tedy povedlo vypočítat výšku shozu na 235 m nad zemí.
Řízené přistání (sekundární mise)
Jak dopadlo naše řízené přistání ukazuje obrázek.
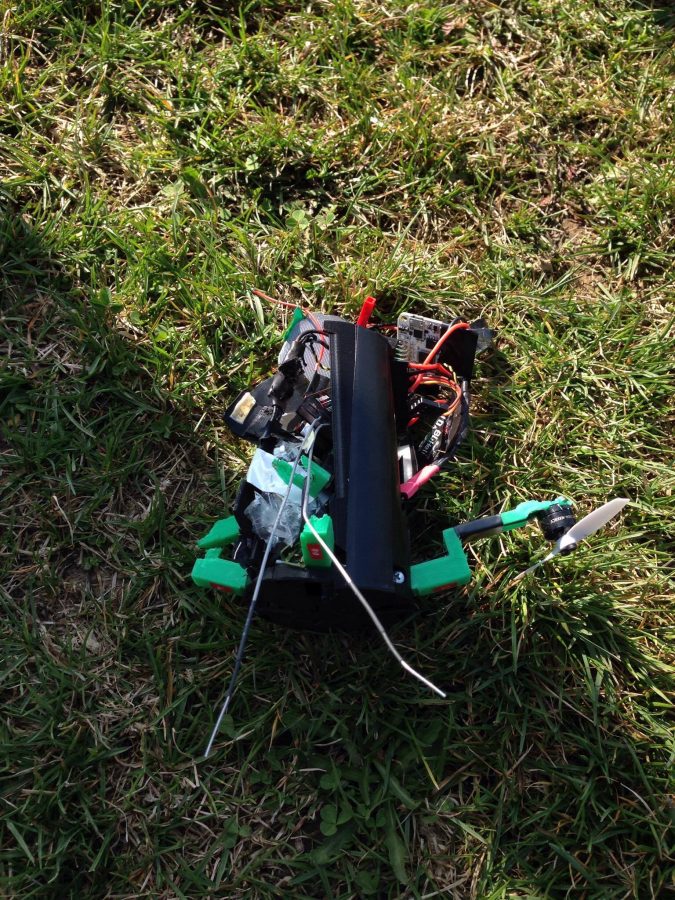
Náš plán byl založen na vysunutí čtyř ramen s motory, které by zbrzdily pád a umožnily přechod do “letu”. Po vypuštění našeho CanSatu však došlo k otevření pouze jednoho ramene, takže místo letu následoval volný pád trvající necelých 7 sekund s dopadovou rychlostí cca 68 m/s. Po dopadu došlo ještě k explozi a následnému požáru naší baterky, takže z našeho CanSatu toho moc nezbylo.
K vyklopení ramen mělo dojít po spuštění motorů, domníváme se, že motory bohužel nenaskočily kvůli tomu, že se CanSat po vypuštění naklonil. Deska NAZE32, stejně jako všechny ostatní řídicí desky pro drony, potřebuje být ke spuštění motorů v rovině.
Na závěr bych chtěl poděkovat celému týmu a pořadatelům za skvělou soutěž. Příště se určitě bude dařit ještě více.

- Soutěž CanSat – tým PILSAT #2 - 4.5.2017
- Robotická ruka – CCRH MK1 - 10.4.2017
- Soutěž CanSat 2017 – tým PILSAT #1 - 30.1.2017