
Výukový robot pro děti mBot2 přichází!

Poznali jste někdy ten pocit, když vám přijede rodinná návštěva a ten bratránek, co sedí naproti u stolu, je v každém ohledu na který si vzpomenete o něco lepší? Tak nejspíš takové pocity asi bude mít náš robot pro děti mBot z první verze, až se setká s mBotem verze druhé. A je to tak asi dobře a zároveň by to mohlo znamenat i jisté posuny v robotím ekosystému u Makeblocku. Hravý robot pro výuku programování mBot2 je v potravním řetězci zkrátka o něco výše než jednička a my si v následující recenzi na tohoto nového fešáka zkusíme zaspekulovat co by to mohlo znamenat.
Musím říci, že u mBota 2 je velmi těžké zhodnotit jednotlivá vylepšení, protože to pánové z Makeblocku vzali skutečně od podlahy a vylepšovali nejenom stávající moduly a jednotlivosti, ale řadu vylepšení na tomto modelu provedli přímo v rámci celkové koncepce. Podle posledních informací bude mBot2 cenově jen o něco dražší (cca 30%) než jeho starší bratránek, což znamená že se nám do rukou dostává kvalitativně daleko lepší výukový robot pro děti za cenu více než přijatelnou. S mBotem jedničkou jsme se už něco nadováděli, teď se ale podívejme podrobněji na jeho povedeného mbotího bratránka.
Obsah článku:
Vylepšení číslo 1 – Modul CyberPi
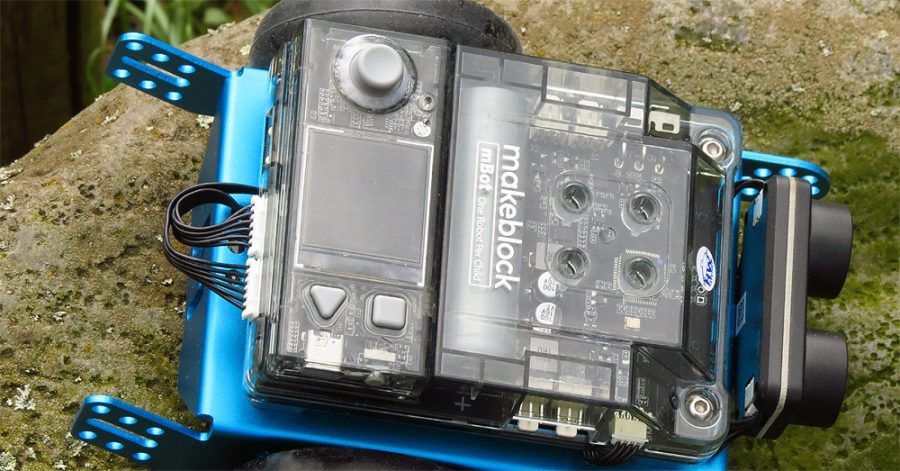
Toto vylepšení je pro mě jednoznačně topkou mezi všemi vylepšeními, které vývojáři z Makeblocku na mBotovi provedli. Jedná se vlastně o kompletní „výměnu mozku“ – tedy mikrokontroléru arduino ve staré verzi mBota 1 za mikrokontrolér ESP32 pro novou verzi mBota 2. Samotný modul CyberPi je v průhledném plastovém pouzdře a je snadno demontovatelný z šasi robůtka.

Modulek CyberPi je jednoduše vložitelný do konektoru. Obsahuje vstup USB – C na boku pro programování a napájení. Mikropočítač CyberPi je provozovatelný i samostatně jako řídící platforma pro vlastní konstrukce, ale je třeba jej doplnit dalším modulem, který řeší napájení. Napájecí modul je pak součástí stavebnice CyberPi Go Kit. V případě mBota tuto roli zastupuje jeho šasi, kde je umístěna LiPo baterie. Samotné šasi je bez řídící jednotky CyberPi mrtvým kusem hliníku/plastu 😀.
A nyní co nám modul CyberPi vlastně umožňuje. Při prohlídce následujícího obrázku, na kterém je rozložení prvků na modulu CyberPi zjistíme, že nám tento modul nabízí minimálně dvě integrované funkcionality, které byly ve starší verzi mBot 1 realizovatelné pouze dokoupením doplňkových modulů.
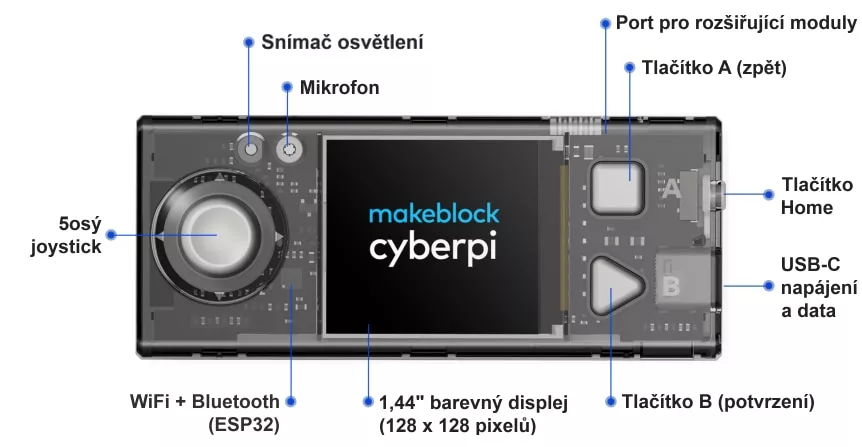
Zmiňovaným vylepšením je 1,44 palcový barevný lcd displej a druhým je integrovaný zvukový modul umožňující nahrávání a přehrávání zvuků, což jsme mohli u mBota 1 realizovat pomocí ME TFT LCD Displeje a pomocí zvukového modulu ME Audio Player.
Kromě toho je na modulu pětiosý joystick a dvě programovatelná tlačítka A a B. Joystick slouží zejména k pohybu v menu (CyberPi má jakýsi mini OS), ale není důvod nevyužít jej k řízení vlastních programů, stejně jako obě tlačítka. MBot 1 nabízel pouze jedno jediné programovatelné tlačítko.
Zvětšení kapacity se dočkalo i vybavení LED. Oproti dvěma LED světlům na hřbetě mBota 1 obsahuje CyberPi LED pásek s pěti RGB svítivými diodami, které po vsazení modulu do šasi svítí v zadní části mBota.
Vybavení čidly doznalo rozšíření o modul gyroskopu a akcelerometru. Zůstal snímač osvětlení a velkým plusem je možnost využívání Bluetooth i Wifi sítě (dříve měl mBot integrovanu funkci buď Bluetooth, nebo WiFi, ale ne obojí).
Zajímavou možností je také využití jakéhosi mini operačního systému CyberPi, které umožňuje uložit až osm programů (mbot 1 pouze jeden). Z výroby jsou na těchto slotech dodány demonstrační programy, které také stojí za shlédnutí, předvádějící možnosti modulu.
Vylepšení číslo 2 – Celková konstrukce mBot2
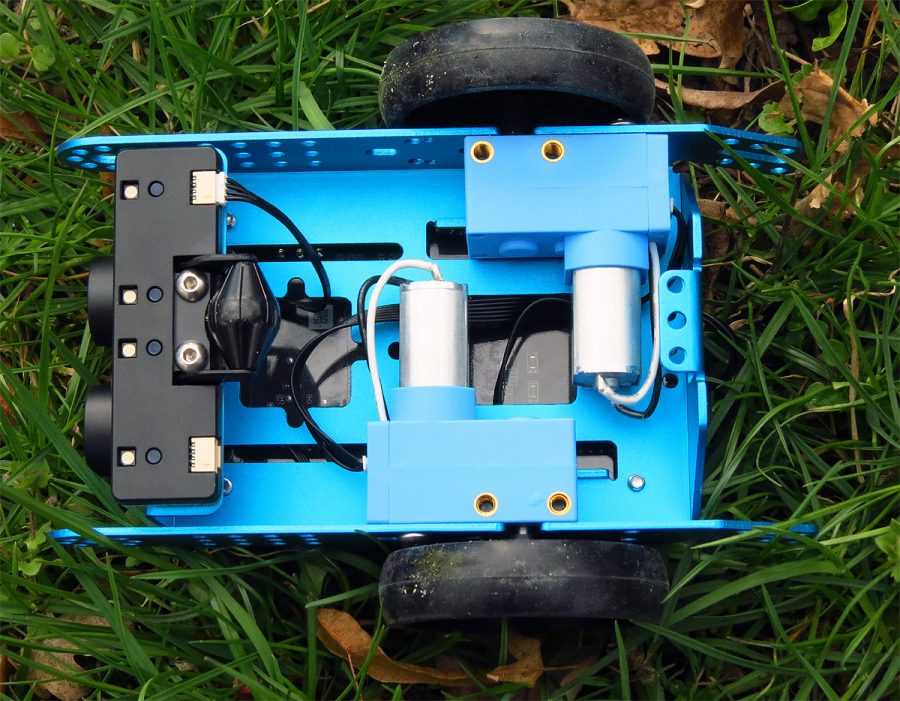
Celkově jeví celá konstrukce řadu drobných optimalizačních zásahů, které přispěly jednak ke zpevnění celé sestavy, ale také ke zjednodušení montáže.

Zůstalo typické modré tělo z ohýbaného perforovaného hliníkového plechu, kde se pouze rozšířily otvory pro průchod kabeláže (čímž makeblock vychytal asi jedinou chybu této části mBota). Kovové šasi a kolečka jsou ale asi tak to jediné, co zůstalo víceméně beze změny.
Oproti mBotu typu 1 zmizely mosazné distanční sloupky mezi kovovým šasi a plastovým modulem s mikrokontrolerem. U mBot2 plastový modul s mikrokontrolérem volně dosedá na kovové šasi. Výsledkem je výrazné zpevnění sestavené konstrukce a zjednodušení celé montáže. Drobným nedostatkem z toho vyplývajícím je zmenšení prostoru pro kabeláž, takže při instalaci nějakého doplňkového modulu bude zřejmě nutno horní desku demontovat, vložit kabeláž a opět vše přišroubovat. Demontáž vrchní desky je ovšem snadno proveditelná a proto je tento problém vyloženě drobností.

U MBota 2 došlo k radikální změně v případě kabeláže. Zmizely staré robustní konektory RJ25, byly vyměněny za konektory typu JST. Tato změna má, jak už to tak bývá, své výhody i nevýhody. Výhodou jsou zcela určitě menší rozměry konektoru a jejich typová variabilita. Variabilita konektoru, co se týče počtu obsluhovaných vodičů, umožňuje volbu typu konektoru JST přímo podle potřeby (a tím se opět optimalizuje prostor potřebný pro konektory).

Nevýhodou změny konektorů (a zde se jedná víceméně o můj subjektivní dojem) je náročnost manipulace s tímto typem konektoru. Pro vyjmutí i zasunutí je třeba jisté šikovnosti a zejména síly v prstech. V případě sestavování mBota, které bylo dříve realizovatelné i malými dětmi, je třeba, aby v této fázi pomohl nějaký šikovný dospělák. Řada konektorů je vyjmutelných pouze tahem za kabeláž, což by mohlo v dlouhodobém horizontu ovlivnit i životnost kablíků. Ale předpokládám, že bude možno časem objednávat kabely i zvlášť a pak by případná likvidace konektoru opotřebením asi nehrála takovou roli.
Nerovnost mez počtem modulů, které by bylo možno na mBota 2 osadit (mBot 1 umožňoval pouze čtyři moduly) je řešena využitím sériové komunikace. V rámci tohoto způsobu přenosu dat zvládne CyberPi obhospodařit až 10 různých modulů pospojovaných sériovou sběrnicí. Pro připojení na samotného mBota tak stačí pouze jediný konektor po pravé straně v přední části mBota.
V rámci zapojení je úplně jedno jak moduly řadíte. Každý z nich má zabudovaný identifikační obvod díky kterému si je CyberPi dokáže bez problémů vybrat a využít.
Vylepšení číslo 3 – Moduly v základní sestavě
Měl jsem k dispozici pouze dva moduly dodávané v základní sestavě mBota 2. Podobně jako u mBota 1 se jednalo o ultrasonický modul pro měření vzdálenosti a line follower – modul pro čtení čáry. Dlužno ještě poznamenat, že v rámci této platformy makeblock ohlašuje až 60 dalších různých modulů, z nichž některé jsou velmi zajímavé a jiné zase orientované spíše na fyzikální pokusy (což může být dobrá zpráva zejména pro školy).

Oba moduly mají společné „průchozí“ uspořádání konektorů vhodných pro sběrnicově řešené zapojení kabeláže, což jako přidanou hodnotu k celé věci umožňuje i vyšší variabilitu při zapojení. Každý modul je možné do sběrnice připojit ze dvou různých stran. Oba moduly byly vloženy do jakéhosi plastového pouzdra, což vděčně kvituji (v případě starší verze mBota ho občas děti upustily na zem, zejména přímo na modul s utrasonicem, a v tom případě to byla pro modul většinou konečná).
Modul s ultrasonicem doznal ještě jednoho drobného doplňku, což je svítící prstenec kolem vysílače a přijímače u kterého se přiznám – jsem nikde nenašel nějaké podorobnosti k jeho využití. Tiše doufám, že se nejedná pouze o designový doplněk, ale že to bude využito, třeba jako doplňková signalizace.
Velké změny nastaly u modulu pro čtení čáry, kdy z mého pohledu zasloužilého uživatele mBota 1 byly do jednoho modulu pro mBota 2 sloučeny tři různé moduly mBota 1 (ME Snímač čáry, ME Profi snímač čáry a ME snímač barev). Vylepšený Line Follower totiž má rovnou čtyři snímače (které mohou díky šikovné knihovně pracovat ve třech různých režimech odpovídajícím předchozím verzím) a samozřejmě čte nejen černou a bílou, ale i barvy. U starší verze mBota tyto možnosti nebyly v základní nabídce.
K dalším připravovaným modulům jsem nedostal žádné doplňující informace, ale již jejich výčet (získaný z knihoven, které jsou v editoru mBlock 5 k dispozici) je velmi zajímavý a leccos naznačující – chytrá kamera, senzory vlhkosti půdy a ovzduší, či tepelné čidlo. Magnetický senzor a detektor plynu. Různé moduly pro „čtení“ vzdáleností. LED matrix. Ovladač serva, nebo PIR detektor. Také se těšíte? 🙂
Vylepšení číslo 4 – Baterie
Novinky se nevyhnuly ani bateriové soustavě. Oproti verzi mBot 1, kde byla baterie externě umístěna mezi mikrokontrolerem a pojezdovým šasi ve formě buď LiPo baterie v pouzdru, nebo bateriového modulu se čtyřmi tužkovými baterkami, má robot pro děti mBot2 pořádnou baterii přímo integrovanou do pouzdra s mikrokontrolerem. Baterie je naddimenzována (viz. následující tabulka) a nevyměňuje se. Životnost baterie v materiálech, které jsem měl k dispozici, nebyla nijak deklarována, ale můj odhad je, že nějaký ten pátek by měla vydržet :-).
| Lego Ev3 | Lego Spike | mBot 1 | mBot2 | |
|---|---|---|---|---|
| Kapacita baterie | 2,050 mAh | 2,000 mAh | 1,800 mAh | 2,500 mAh |
Baterie je dobíjena přes USB konektor z PC přes modul CyberPi, což se mi jeví, jako poněkud nešikovné. Odhadl bych, že více vybitou baterii bude třeba tímto způsobem nabíjet delší dobu. Uvidíme jak na to Makeblock zareaguje, zejména školám, které by provozovaly větší počet mBotů tohoto typu, by to mohlo poněkud zkomplikovat práci. Třeba uvidíme na trhu nějakou multinabíječku na větší počet mBotů 2.
Vylepšení číslo 5 – Motorová soustava
Na možné vylepšení ohledně pohonu mBota 2 jsem byl velmi zvědavý. Konstrukce motorků byla totiž u mBotů verze 1 dlouholetou a velmi bolavou záležitostí. Motorek byl komplet v plastu (a to včetně převodů) a tomu také odpovídala přesnost pohybu. Vzhledem k tomu, že velká část programovacích úloh při mé výuce byla typu: „někam dojeď po zadané dráze“. Fakt, že robůtek mBot 1 jezdil někdy s naprosto šílenými odchylkami, byl značně deprimující. Odchylky se pak zvyšovaly přímo úměrně se služebním stářím mBota, jak byla celá soustava vyviklaná.
Nepříjemný byl i případný pád mBota na zem, kdy se občas urazila plastová osa a bylo vše třeba vyměnit. Makeblock na tento problém reagoval doplněním základní sestavy mBota 1 náhradními osami, ale to samozřejmě nevyřešilo problém s převodovkou a nepřesným motůrkem.
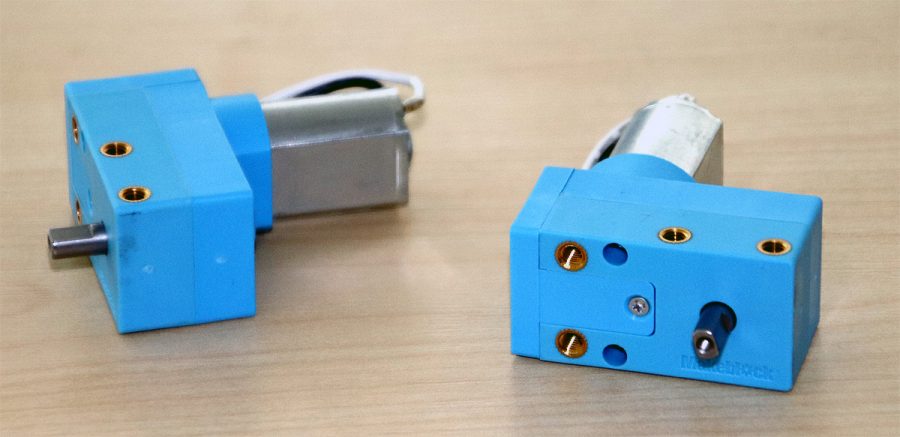
Motorky pro mBota 2 jsou chválabohu kovovou záležitostí a navíc mají pro zajištění přesného pohybu enkodéry. Celá konstrukce převodovky i motorku je kompaktně a pevně spojena a stažena šrouby. Nic se neviklá a osa vystupující z převodovky je kovová. Motory s enkodéry jsou stejné jako u jiného robota pro děti od firmy Makeblock a sice mBot Ranger. Při indikativním testování přesnosti jízdy se mBot choval velmi slušně. Zřejmě s přesnějším chováním motorků počítal i výrobce, vzhledem k programovým blokům editoru, které optimisticky umožňují přímo zadávat pohyb v centimetrech a otáčení v přesných úhlech. Je to rámcově skutečně přesné, ale je jasné, že je třeba započítat i vliv povrchu na kterém se má mBot robot pro děti pohybovat.
Konstrukce motorků umožňuje ovšem nejenom přesnější pohyb, ale nabízí díky zabudovanému enkodéru i další zajímavou možnost – snímání počtu otáček z každého motorku. Tím je možné pohyb robota naprosto přesně kontrolovat. Kromě této možnosti je funkcionalitu možné využít například i jako možnost přesné regulace čehokoliv otáčením kola (pokud bude šasi mBota například využito jako pevná základna).

Co se týče celkového vylepšení pohybového ústrojí mBota je jasné, že tomuto problému věnovali v Makeblocku značnou pozornost a dali si s vylepšením velkou práci. Proto pro mě s podivem zůstává, že k vylepšeným motorkům s vylepšenou převodovkou s akcelerometrem byla použita laciná původní kolečka s prokluzující pneumatikou, která sice nejsou úplně na závadu, ale vzorem přesnosti jistě také nebudou.
Vylepšení číslo 6 – Programování mBot2
Pro programování mBota 2 je třeba využít editoru mBlock 5, který výrobce nabízí volně ke stažení na svém webu. Grafické programování je pro tyto potřeby ideální. mBot2 tak může fungovat jako plnohodnotný robot pro děti.
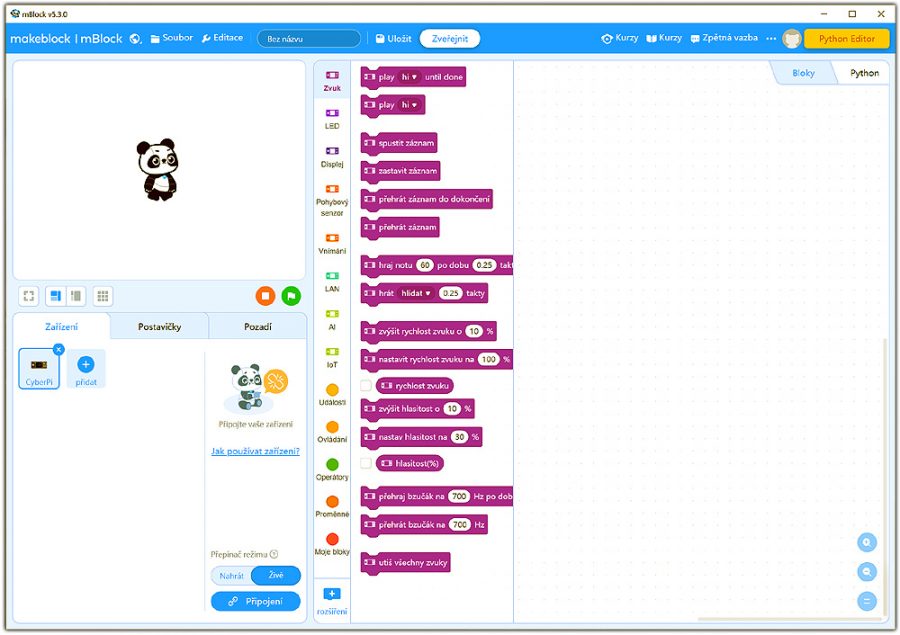
Makeblock nabízí verzi mBlock 5 pro PC (64 bitová verze pro Windows 7/10 a macOS 10.12+), pro mobilní telefony (verze pro Android 6.0+ a iOS 10.0+). Vyzkoušet programování je možné i online ve webové verzi (nezkoušel jsem). MBot2, respektive jeho řídící jednotku je možné programovat buď graficky ve Scratchi, případně kódem v MicroPythonu. Musím říci, že dojmy z práce v tomto editoru jsou pro mě značně rozporuplné (možná díky návykům z verze 3).
Je jasné, že mBlock 5 je nástroj poskytující značné možnosti. Problémem podle mě je, že je vlastně neustále ve vývoji, stejně jako robotické platformy, které by měly být přes něj programovány. A tak v editoru mBlock 5 naleznete sem tam různé nedodělky typu nepřeložené programovací bloky, nebo chybějící nápovědu, či texty v čínštině. Ale to jsou zjevně potíže zrodu. MBlock 5 pozoruji již delší dobu a je zřejmé, že se z něj stává robustní nástroj pro programování celé škály výrobků od Makeblocku.
Poměrně snadno lze s mBlock 5 programovat více než 100 typů různých zařízení, včetně Arduina, ve dvou režimech – pomocí scratchových bloků (vhodné pro nováčky), či v MicroPythonu (vhodné pro pokročilejší). Touto duální koncepcí mBlock 5 umožňuje editoru být univerzálně použitelný ve výuce jak pro začátečníky, tak pro pokročilejší. V mBlock 5 lze snadno nadefinovat vlastní bloky či proměnné, což je opět velmi dobře využitelné ve výuce i při tvorbě vlastních algoritmů.
Oproti verzi mBlock 3 přibyla řada vylepšení, které ocení zejména začínající programátoři snažící se v problematice teprve zorientovat – například položka kurzy, která obsahuje několik již hotových programů. Přesto si myslím, že v oblasti komunitní podpory, nápovědy, případně výukových lekcí má tento program co dohánět.
mBot2 ideální robot pro děti
Na závěr bych rád shrnul celkové dojmy z mBota 2. Robůtek má zcela jistě velký potenciál a je velmi dobře použitelný. Neubráním se srovnávání s verzí mBot1. Technologicky je mBot2 rozhodně vychytanější, než jeho předchůdce. Druhá verze mBota dokázala vyřešit řadu nedostatků, kterými trpěl mBot 1 – nepřesnost v pohybu, průměrnou kompaktnost konstrukce, problematický bateriový systém, malou modularitu, či problematické použití v síti. Nabízí dokonce i některé nové možnosti – daleko sofistikovanější systém programování a vyšší kapacitu, kterou sebou přináší využití CyberPi, lcd displej a vylepšené moduly v základní verzi, nebo sběrnicový systém připojení modulů.
Co ovšem paradoxně mBot2 začíná poněkud postrádat je jistá jednoduchost, která byla právě doménou mBota verze 1. Je to asi daň za zdokonalení celé sestavy a za nové možnosti, které mBot2 přináší, že je složitější na programování. Složitější je i prvotní orientace v tom, co vlastně můžeme využít. V tomto případě by asi mohl pomoci servis Makeblocku co se týče informací o této platformě a jejích možnostech. Nepochybuji, že Makeblock v tomto směru zafunguje a informace dá k dispozici.

Můj celkový dojem z této situace je ten, že robot pro děti mBot2 zajímavým způsobem překlenuje mezeru mezi mBotem 1 a sestavami Ranger, či Ultimate určenými spíše pro středoškoláky. Jeho výhodou je poměrně značné rozpětí toho, co se s ním dá podnikat. V tomto směru ještě čekáme na informace o modulech, které bude moci mBot2 využívat (a které určí opravdovou využitelnost v různých oblastech výuky). Další výhodu dává mBotu2 v tomto směru koncepce editoru mBlock 5 zaměřená na opravdu značný počet zařízení se kterými je kompatibilní. Rozhodně v tomto směru aspiruje na pozici jakéhosi standardu v oblasti robotiky.
Firma Makeblock se netají svým zacílením na oblast výroby edukačních platforem. Z mBota 2 tato skutečnost čouhá, jako příslovečná sláma z bot. Proto by u této platformy měly zbystřit zejména školy a školská zařízení zabývající se výukou robotiky, či informatiky, nebo fyziky. Svou koncepcí a schopností ukládat například naměřená data přímo na cloudové úložiště si lze snadno představit zpestření výuky třeba v přírodovědě ve formě ukládání naměřených dat při sledování prostředí, či počasí.
Pokud si mBota 2 pořídí zájemci z řad rodičů coby dárek dětem, je dobré počítat s tím, že je třeba, alespoň ze začátku pomoci s programováním, či při kompletaci kablíků. Je třeba také chápat, že mBot2 sice vypadá jako hračka, ale tak úplně to hračka není. MBot2 je výukový robot pro děti a teprve pokud jej využijete v tomto smyslu projeví se jeho opravdový potenciál.

Stránka mých výukových projektů je na ondranauci.cz
- Arduino hlídač úkolů - 20.2.2025
- Jak hacknout servo motor - 5.2.2025
- TOP 11 Free nástrojů, aby se naše děti naučily programovat - 6.12.2024