
Arduino stabilizace obráceného kyvadla

Spolužáci Ben Wiener a Philip Zucker vyřešili jeden z klasických problémů mechaniky – stabilizaci obráceného kyvadla. To je kyvadlo, které je ale obrácené vzhůru nohama. Cílem stabilizace je pohybovat osou kyvadla tak, aby zůstalo v poloze vzhůru nohama. Osa kyvadla je připevněna k pohyblivému jezdci, který je ovládaný přes ozubený řemen motorem.
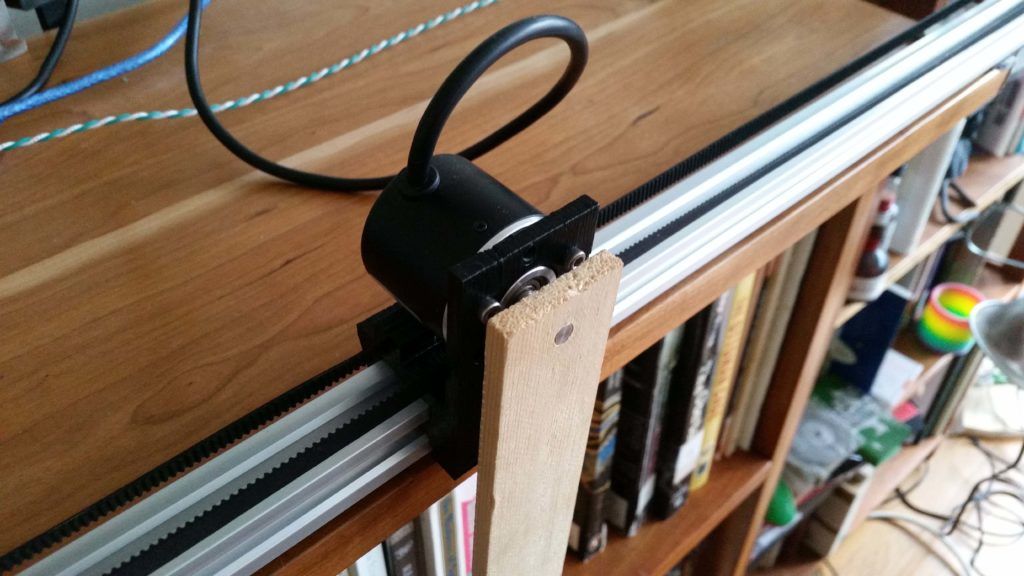
O řízení se stará deska Arduino UNO, které měří úhel kyvadla a také polohu jeho osy pomocí dvou enkodérů.
Přeloženo z https://blog.arduino.cc/2018/05/23/zipy-is-a-homebrew-inverted-pendulum/ a upraveno.

Už nějaký čas se zajímám o věci kolem Internetu věcí a otevřeného hardware a software. Tak jsem se také v roce 2010 dostal k Arduinu, pro které dodnes programuji a taky píšu články o práci s ním. Baví mě vymýšlet, jak staré věci používat novým způsobem.
Latest posts by Zbyšek Voda (see all)
- Programovatelný kytarový pedál s Arduinem - 26.2.2020
- Arduino infračervený teploměr vytištěný na 3D tiskárně - 11.2.2020
- Jak je to s IP, MAC adresami a sítěmi - 18.12.2019