HadrDisk
Vytvořené odpovědi
-
AutorPříspěvky
-
posjirka
ÚčastníkAleš se ptá správně. Ono totiž víc vzduchu neznamená automaticky větší oheň.
Většinou mají tyto řešení svoje limity, nad které nejdou. Když to totiž přeženeš, tak budeš mít jen hodně kouře. Já když nemám zahřátý komín a dám vzduchovou klapnu na plno tak mám za 5 minut kotelnu plnou kouře. Je třeba vychytat jak moc se má otevírat a při jakých situacích. Když to pak zjednodušíš, zjistíš, že tě zajímají 2 polohy:
– udržovací režim aktuální teploty
– zvýšení teploty.zpět k tvé otázce:
ano pustíš do serva 5V ono se otevře na 50%
Zpětné čtení je získání hodnoty z potenciometru na servu. Ve výsledku při analogovém řešení defakto zbytečné.BlindP
ÚčastníkZdravím, jedná se o proudovou smyčku, často využívanou v průmyslu pro přenos na velké vzdálenosti – http://automatizace.hw.cz/proudova-smycka-4-20-ma-obecny-popis . To čidlo je pasivní, takže je potřeba doplnit do obvodu napájecí zdroj. Na straně arduina postavit převodník http://www.ti.com/lit/ds/symlink/rcv420.pdf , koupit něco hotového u čínana, nebo tam dát jen odpor 🙂 – http://circuits4you.com/2016/05/13/arduino-4-20mamp-current-loop/ .
BPkrcmar.tomas@gmail.com
Účastníkproporcionalne
uz to tady zkoumam s kamaradem co lehce rozumi HW pry je to jednoduche postavit
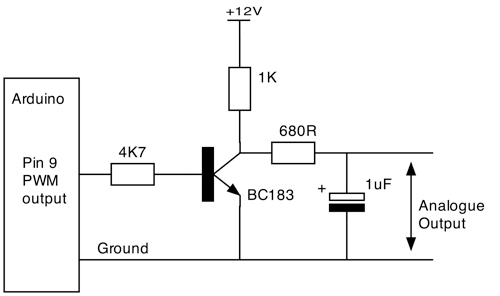
ja zatim chapu ze na pin z arduina poslu hodnotu pres analogWrite(pnKlapka, OpenValue);
a ono mi to nahodi to napeti na vystupu a klapku nsatavi ?
je to tak ?
jenom nevim, jak to bude se zpetnym ctenim te hodnoty jak je klapka nastavena, jde pouzit tento obvod nebo se musi zbastlit neco jineho
diky moc
Aleš
ÚčastníkA potřebuješ tu klapku otevírat proporcionálně, nebo by ti stačilo otevřeno/zavřeno?
ÚčastníkÚčastníkposjirka: diky za namet, pokousel jsem se te stare klapky zbavit ale uz to nejde, zkusim to s tim zdrojem jak pise Ales
Dzaraaa
ÚčastníkNe piny na RS232 nepotřebuji. Zkuste to takhle.
Vojtěch Vosáhlo
ÚčastníkTakže máte připojený RX modulu na TX arduina a obráceně? Možná by bylo lepší dát si rx a tx na 2 obyčejné piny arduina. Pokud to tak uděláte, můžete použít hlavní RS232 na komunikaci s PC. To by bylo asi lepší. Pak napište na jaké piny je to připojeno a já zkusím vyflusnout nějaký kód.
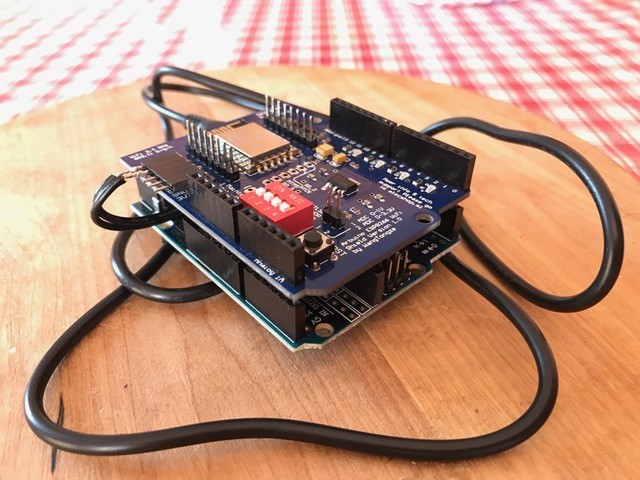
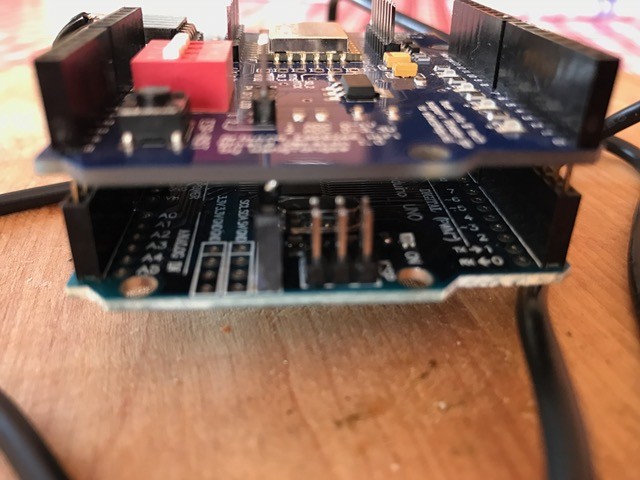
ÚčastníkAno, tak jsem tedy prohlédl shield a zjistil jsem, že RX a TX nejsou vyvedeny na patici pro připojení k arduinu ale mají piny pro připojení zvlášt. Tak jsem provedl propojení RX a TX arduina a wifi shieldu viz. fotografie. Teď bych potřeboval úvodní část pro spuštění. Děkuji.
Attachments:
spiritman
ÚčastníkAno už to funguje.
Dakujem.Účastníkjankop
ÚčastníkCo třeba
//read temperature in Celsius float t = dht.readTemperature();ÚčastníkDakujem,
ešte 1 vec.Mam tento kod čo mám upraviť aby som mal hodnotu v °C?// include the library code:
#include <LiquidCrystal.h>
#include „DHT.h“// set the DHT Pin
#define DHTPIN 8// initialize the library with the numbers of the interface pins
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
#define DHTTYPE DHT11
DHT dht(DHTPIN, DHTTYPE);void setup() {
// set up the LCD’s number of columns and rows:
lcd.begin(16, 2);
dht.begin();// Print a message to the LCD.
lcd.print(„Teplot: Vlhkost:“);
}void loop() {
delay(500);
// set the cursor to column 0, line 1
// (note: line 1 is the second row, since counting begins with 0):
lcd.setCursor(0, 1);
// read humidity
float h = dht.readHumidity();
//read temperature in Fahrenheit
float f = dht.readTemperature(true);if (isnan(h) || isnan(f)) {
lcd.print(„ERROR“);
return;
}lcd.print(f);
lcd.setCursor(7,1);
lcd.print(h);
}magic
Účastníkjj na tebe Dariro, napsal jsem email
darira
Účastníkmagic:
Nevím jestli to bylo na mě. Když tak napiš na darira@seznam.cz. Je to nepoužívaný email, pošlu ti ale kontakt na FB.
mamterada:
Odkaz na stažení ti přepošlu na mail jak se k tomu dostanu. Sem ho zatím nechci dávat, je to rozpracovaný.Účastníkto je ofiko arduino z jejich webu
https://www.arduino.cc/en/Main/Softwaremamterada
Účastníkdarira: Super, vypadá to docela sofistikovaně 🙂 jestli se podělíš i se svým poladěným kódem tak samozřejmě budu moc rád. Ještě taková hloupá otázka, to je co za program ze kterého jsi dával screen?
Účastníkje na tebe nějaký svižnější kontakt? skype, fb, či něco? teď bojují s jednou blbostí, třeba by jsi vědět..
ÚčastníkJe možný to „roztrhat“ na přehlednější bloky. Jedna z prvních věcí co jsem udělal. Ten zákládní program je na jednom listě a to je mazec.
Attachments:
Účastníksuper díky.., když vidím ten několikastránkový kód, tak je to teda masakr 😀 sám se na to úplně necítím
takže kdyby se našel adept z Brna, co má taky nějaké znalosti a chce něco podobného stavět.., tak můžeme dát hlavy dohromady.
Jinak dáte tip na nějaký solidní editor co se dá nainstalovat na Win, a má jak grafickou návrhovou část včetně modulů, tak kompletní test programu, jako třeba : https://circuits.io/circuitsdíky
Účastníkmagic + mamterada:
Ahoj, vykradl jsem projekty co se dají sehnat na netu. Základ je v iAqua.
http://www.plantedtank.net/forums/20-diy/677265-iaqua-my-touch-interface-aquarium-controller-arduino.htmlV základu je pomalé načítání raw grafiky, atd. Tak jsem upravoval tento kód. Je to určené pro akvárium, ale snad Vám to pomůže. Nemusíte řešit projekt úplně od nuly. Já jsem na tom pochopil dost věcí, které bych sám asi nedal. O víkendu se k tomu snad dostanu, tak ti pošlu kód a knihovny (pokud budeš chtít můžu i návrh tištáku pro zapojení). Už mě nebavilo to třetímu známému vysvětlovat co má jak zapojit, tak jsem začal psát postup (příloha).
http://leteckaposta.cz/812799333ÚčastníkJediné co potřebuje kdokoliv kdo se tu bude podílet vědět je jaký je pinout shieldu. Tzn. kam vede RX a TX ESP. Tohle prostě musíte zjistit vy. Proměřte to, najděte na netu obrázek ESP 12 a proměřte na jaký pin duina jdou. Pak se tu dá něco vymýšlet. Pokud tu už někdo zmiňoval jaké piny to jsou tak mě tam odkažte ale já si nevšiml…
ÚčastníkStále se mi nedaří zprovoznit wifi shield na arduinu. Mohl by prosím někdo z Vás sepsat návod co jak zapojit a jaký kôd napsat, aby bylo arduino s wifi shieldem komlet připraveno k akci. Děkuji Všem co se podílejí.:)
Zbyšek Voda
ÚčastníkDobrý den,
zrovna Sparkfun má dokumentaci zpracovanou opravdu kvalitně 🙂
Tady je například stránka produktu: https://www.sparkfun.com/products/9721Najdete tam odkaz na Datasheet i ukázkový kód.
17.1.2017 v 14:25 odpověď na: BRNO – plně automatizovaná zahrada s dohledem // od píky, někdo z lokality? #10060ÚčastníkZdar, napsal jsem na skype.
Nicméně dle Nicku Brňák nebudeš.., takže pokud by byl někdo lokální, zvu na drink a můžeme to probrat 😀
Díky17.1.2017 v 11:12 odpověď na: BRNO – plně automatizovaná zahrada s dohledem // od píky, někdo z lokality? #10059Luke_CZ
ÚčastníkA, HW to není problém, jen si ujasni, kolik drátů budeš, v případě drátového připojení, tahat, nebo jít do částečně bezdrátové varianty, tj. posílat data z místních čidel do ústředny vzduchem
B, pokud chceš provozovat zahrádku online, tak bych spíše šel do ESP8266, resp.NodeMcu, či WeMos, a nebo už do nějakého levného OrangePi
C, v případě výše uvedených mcu lze provozovat vlastní webový server či posílat data do cloudu, samozřejmě to předpokládá, že máš v dosahu zahrádky WiFi
L.
PS: Kdyžtak se ozvi na Skype: velky_ujezdÚčastníkDarira: to zní super, určitě by mi to do začátku pomohlo, samozřejmě se pak pochlubím co z toho ve finále vzniklo 🙂 tak jestli to máš někde ke shlédnutí, případně jestli můžu poprosit kontakt na mail honza@mamterada.cz Moc díky!
BlindP: jasný to jsem psal s nadsázkou, že by to tady měl už někdo hotový a jen mi to dal k dispozici 🙂 jinak co se týká Arduina tak sice začínám ale mám vystudovanej slaboproud, takže mi to téma není úplně cizí 🙂 ideální je když tě něco tlačí (termín, partnerka…) a pak se většinou dílo vydaří. Samozřejmě bych nechtěl vymýšlet už vymyšlené, proto jsem oslovil tady na fóru, protože častokrát nějaká „nepodstatná“ informace je ve finále dost důležitá.
Když se Arduino osvědčí, tak mám několik dalších projektů kde by se dalo dobře využít 🙂 třeba se pak vám něco z toho taky bude hodit. V podstatě bych chtěl automatizovat malou farmičku… rybníček s vodní elektrárnou, větrná a solární elektrárna, ovce, sad, včely… no a teď začínám skleníkama 🙂 je to běh na dlouhou trať jak ve výrobě tak ve výstavbě.ÚčastníkTo : Darira
Zdar, mě by možná tvůj kód docela pomohl, můžeš prosím dát nějak k dispozici.
DíkyÚčastníkJo tohle je psané na megu. Moje chyba. Vemte kód odsud: https://www.arduino.cc/en/Tutorial/SoftwareSerialExample
ÚčastníkMáte na mysli tento:
void setup() {
// initialize both serial ports:
Serial.begin(115200);
Serial2.begin(115200);
}void loop() {
while(Serial2.available()) Serial.write(Serial2.read());while(Serial.available()) Serial2.write(Serial.read());
}A které příkazy mi určují TX a RX?
-
AutorPříspěvky