krokodile
Vytvořené odpovědi
-
AutorPříspěvky
-
posjirka
Účastníkjaký je rozdíl mezi byte a char ? 🙂
obojí je 8-bitová proměnná, jen se jinak zobrazuje, resp. je to jiný pohled na stejnou kombinaci 8 bitů.
Nevím na co to chceš, ale 433MHz je opravdu jen pro přenos jednoduchého kodu. Těch rušení v okolí je spousta (meteostanice, centrální ovl. auta, bezdrátové zvonky ,…).
Navíc je to jednosměrná komunikace.
Nepíšeš ovšem k čemu to chceš, tak je těžké poradit……Účastníknemáš zač. Tu hrubou stupnici jsem tam navrhoval od začátku proto, že nikdy neudržíš ruku ve stejné vzdálenosti od čidla. To čidlo taky nikdy nedá 2x po sobě stejný výsledek už jen proto, že se musí počítat z dozvukem předcházejícího signálu , nerovnosti plochy, atd atd.
Ani průměr několika hodnot ti nepomůže a budeš mít nejen velký rozptyl, ale navíc tě to bude stát spoustu času.
Zkoušel jsem zkrátit čas smyčky na 500ms a nefunguje to špatně, navíc je to celkem rychlý.Rád jsem pomohl,…
Nacelnik
ÚčastníkAhoj, několikrát jsem četl tvůj kód a kombinace map a constrain je to pravé – vždycky jsem to řešil nějakým matematickým vzorcem, tyhle fce to udělají jednodušeji a najednou mi to dává smysl….
děkuji ti moc, touhle ukázkou jsi mi ušetřil několik dní života.
Pěkný den a večer.
DavidÚčastníkhotovo, odzkoušeno, vyřešeno. Až to vyzkoušíš v realitě zjitíš pro je zbytečné a krajně nevhodné hrát si s lineární stupnicí. Po odzkoušení pak celou serivou komunikaci zakomentuj ať ti zbytečně nezkouší odesílat data. zdržuje to procesor a může se i resetnout.
// LED ovládaná rukou v.2 // by JP 2016 // přiblížením ruky se reguluje intzenzita jasu LED od 0 do 100% jasu. // zatím ve 12 krocích 0 - 240 PWM // jemnější nastavení už téměř nejde dosáhnout. // nová intenzita se nastavuje přiblížením ruky na dobu 2s // V.2 - použito funkce map() pro nastavení citlivosti // knihovna EEPROM #include <EEPROM.h> int echoPin = 2; // přijímač int trigPin = 3; // vysílač long distance = 0; // čas odezvy / vzdálenost int LED = 10; // pin s LED diodou s PWM řízením long lastDistance = 0; // hodnota posledního měření int pwm = 0; // hodnota PWM long max_dist = 1500; // maximalni vzdalenost v ms long min_dist = 100; // minimalni vzdalenost v ms long kroku = 6; // pocet stupnu intenzit, kdy 0 = vypni, max = nereaguj takze pocet stupnu je koku-1 byte adresa = 1022; // adresa záznamu v EEPROM void setup() { Serial.begin(9600); pinMode(echoPin, INPUT); pinMode(trigPin, OUTPUT); pinMode(LED, OUTPUT); pwm = EEPROM.read(adresa); // načtení poslední hodnoty z EEPROM analogWrite(LED, pwm); // zápis PWM } void loop() { // vysílám impulz digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // měřím délku odezvy distance = pulseIn(echoPin, HIGH); Serial.print(distance); distance = map(distance, min_dist, max_dist, 0, kroku); // prepocet na stupne intenzity svitu LED distance = constrain(distance, 0, kroku); // omezení přepočtu na nastevný rozsah Serial.print("/"); Serial.print(distance); Serial.print("/"); Serial.println(kroku); if (lastDistance == distance){ if (distance < kroku){ pwm = distance * (255/(kroku-1)); // přepočet na PWM analogWrite(LED, pwm); // zápis PWM // změna oproti záznamu v EEPROM if (pwm != int(EEPROM.read(adresa))) { EEPROM.write(adresa, pwm); // záznam do EEPROM Serial.print("Zapis do EEPROM ..."); } } } Serial.print("Aktualni PWM ..."); Serial.println(pwm); lastDistance = distance; // předání záznamu posledního měření delay(1000); }Účastník…nechám to tu chvilku odležet, nemám moc dobrý den a vznikla by zbytečná hádka bez řešení….. nech to být, hol jsem starý morous….
Účastníknapíšu to hodně mírně : jaké máš zkušenosti s touto oblastí ???
Mám na mysli aplikace senzorů v reálném světě.ÚčastníkTu epromku bych použil pouze v při prvním zápisu „nastavení“, a pak ppři změně. tu změnu počítám tak 1 -2x za týden. Takže 100000/2 je mraky týdnů.
ad1) to se dá vyřešit matematicky ( např každé 2 cm = 1 PWM) + přidat argument – více jak 51cm – ignoruj
ad3) Jak to myslíš? To jsem nepochopil…Můžeš mi dát konkrétní příklad?D.
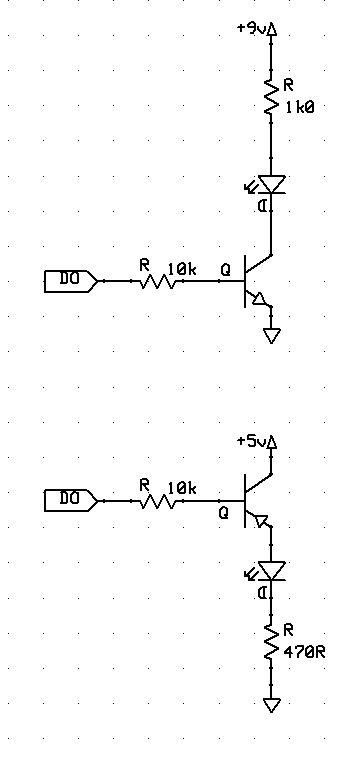
Účastníktribal tam má chybku.
Buď použiješ :
1, NPN pro spínání země : logická 1 přes odpor otevře tranzistor a ten sepne zátěž a moc ti nezáleží na tom jestli je napájeci napětí 5V nebo 12V. Stačí správně určit protékajíc proud, podel toho vypočítat předřadný odpor a vybrat tranzistor, který tu zátěž vydrží.
2, PNP spínáš napájecí napětí : logická 0 přivede „záporné“ napětí na bázi tranzistoru. Ve výsledku ale nepustí vyšší napětí než je napětí mikroprocesoru (tedy 5V), nebo nepůjde uzavřít tranzistor. je vhodné pro spínání zátěže stejného napští jako má mikroprocesor o větším proudu.Někdy se používá kombinace pro spínání segmentu a číslaovky.
Ve zkratce použij zapojení s NPN tranzistorem.
Attachments:
Účastníkod pohonu se bude odvijet typ ovládání (pWM, Hmustek, krokáč)
Jinak samozřejmě Ardunio (v podstatě je jedno jakýkoliv) a gryoskop.Možná se podívej na diy projekty BB8.
Účastníkspíš se bude vše obvijet od typu pohonu. Nepíše třeba jaká je třeba reakční rychlost, jaké předpokládáš mezní parametry, napájecí napětí, síla atd.
Na něco stačí stolice + deska spojená šroubovnicí, někde potřebuješ řemenici Tady všude je určitá mez + koncové dorazy/spínače.
Na něco potřebuješ kluzné plochy spojené koly se základnou podoběn jako BB8 🙂klachma
ÚčastníkAha, v tom článku právě psali o PNP, tak jsem koupil PNP. Díky za tip, zkusím ten BC337.
Účastník5m je v pohodě, většina těch modulů nemá problém ani s 10 m.
Jen si mi pořád neřekl jaká data tam potečou, jak jsou důležitá, jak často se budou opakovat, jaké je potřeba zabezpečení těch dat …
na 433 MHz pracuje kde co, třeba i meteostanice, nebo dálkové ovládání centrálu u auta. pro důležitá jednorázová data není moc vhodný, spíš pro přenost dat ze senzoru, s opakovatelnosti třeba 1x 5s.
Bluetooth je vcelku v pohodě jen si musíš udržet vazbu obou zařízení ať se ti nechytne na kdejaký mobil
2,4GHz pracuje taky vcelku dost věcí (právě bluetooth, dálkové ovládání pro modely, …)
WIFI je taky na 2,4GHz nebo na 5GHz podle typu sítě a potřebuješ mít aktuální název SSID a správné heslo. Provést aktualizaci zanmená nahrát nový program do mikroproces.
Je potřeba opravdu správně vybírat, podle toho na co to chceš, z toho, že to bude panel na ruku moc nezjitím. Může to být 1x denně data o objemu 2kB (potřebuješ větčí zabezpečení a kontorlu popslaných dat) , nebo každých 5s data o 5MB (v tu chvíli taky můžeše zarušit vlastní WIFI signál pro jiná zařízení)….Jak vidíš nejlepší je starý dobrý drát, nebo mě ještě napadá IR jak pro dálkové ovládání …. Pro jednoměrnou komunikaci to může být vhodné řešení.
Účastníkwooow kaviárové tousty … BC556 je PNP tranzistor, ten se otevírá při záporném napětí na bázi.
Použij BC337 …Účastníkeepromka ti moc nepomůže, spíš ji ničíš neustálím přepisem. Má max 100 000 přepísů což vypadá nekonečně ale při zápisu 1 x 1s = 100 000 s = 1666 min = 27h takže za 1 den zničíš 1 buňku eeprom….
Když se nad tím zamyslím, tak by to mohlo jít např. touto cestou:
1, udělat to formou hrubé stupnice např:
<10cm = 0 (pwm)
15-20cm = 85
25-30cm = 170
35-40cm = 255
>40cm = zapiš ale ignoruj
žádné mezi stavy, prostě tyto hodnoty.
2, Každou 1s si změříš vzdálenost.
3, Tu zapíšeš do pole o 5-ti hodnotách, které budeš neustále posouvat.
4, Když 3 z 5 hodnot budou stejné a přitom menší než 40cm nastav PWM a zapiš do eeprom (pokud je změna proti původní hodnotě v eeprom)Takže dáš ruku na víc než 3s na vzdálenost/intenzitu jakou chceš a podle toho se ti nastaví LED.
Co ty na to? Je to co si představuješ?
ÚčastníkAch jo, já jsem asi úplně blbej. Mohl bys mi prosím poradit, jaký tranzistor tam dát? Zkusil jsem tenhle: http://www.gme.cz/bipolarni-tranzistor-bc556a-to92-p210-035 a dioda pořád nesvítí. Nevím, jestli jsem nedělal blbost, ale měřil jsem napětí Uce a je pořád 4,5 V, i když zdroj dává 9 V a v celým obvodu je jen ten tranzistor a dioda a hlavně to napětí tam je ať mám na bázi 0 nebo 5 V.
ÚčastníkAhoj, zneužiji již tento vyřešený dotaz ke svému.
Jsem ve fázi úvah kdy chci také měnit intenzitu jasu pomocí vzdálenosti. Můj problém je ten, že když podržím překážku třebas v rozmezí 10-40cm (ta bude pevně daná) chci aby tato vzdálenost byla převedena na PWM a dále když tu překážku odstraním, tak chci aby hodnota PWM platila i pro odpojení napájení. Jenže jak to udělat?
Podržím ruku na 10 cm bude PWM 125 (vymyslel jsem si toto)
ale když tu ruku odstraním, tak nechci další přepočet ale chci aby platila hodnota 125.
PO čase podržím ruku na 30cm, přepočte se hodntota na PWM (třeba) 200 a pak když dám tu ruku pryč, aby zas platila hodnota 200.Šlo by to zapisovat do EEpromky ( nebude častý zápis),ale jak udělat to, že když dám ruku do vzdálenosti 10cm , rozsvítí se ledka jasem PWM 125 a když překážku odstraním, nedojde k přepisu hodnoty PWM dokuď zase nepodržím ruku jakkoliv ve vzdálenosti 10-40cm.
Poradíte?
Děkuji velice
David
Účastníknemusíš to nulovat, stačí když budeš dál odpočítávát millis od old-millis. Stejně to nepustí v rámci proměnné více než je její rozsah a bude ti počítat od nuly. když dáš byte a jeho max hodnotu 255 a příčteš 1 tak máš zase 1 a né 256.
Le_Ze
ÚčastníkA nedá se časovač programově vynulovat?
Zbyšek Voda
ÚčastníkFunkci „nepřetíkat“ nedonutíte, ale můžete s tím v kódu počítat.
Když najednou funkce millis nevrací něco přes čtyři miliardy (kdy přetéká),
ale jede od nuly, musíte s tím v programu počítat a například si vynulovat nějaký čítač, nebo podobně.ÚčastníkTak zbyla chvilka času a ja chtěl vzykoušet i to s millis.
Dočet jsem se, že u funkce millis dochazí co 50 dní k přetečení.
Da se to nějak pořešít?rades
ÚčastníkTím panelem myslím hodinky s pár tlačítky, kterými budu ovládat to druhé arduino, na kterém jsou připojeny 2 relé, dva teploměry a ještě čidlo pohybu…. první arduino funguje normálně pomocí BT, ale uvažoval jsem i o jiných možnostech. Dosah bych si přál tak, ať mi to funguje v místnosti o velikosti cca 5×5 m..
ÚčastníkTím panelem myslím hodinky s pár tlačítky, kterými budu ovládat to druhé arduino, na kterém jsou připojeny 2 relé, dva teploměry a ještě mám v plánu čidlo pohybu…. první arduino funguje normálně pomocí BT, ale uvažoval jsem i o jiných možnostech. Dosah bych si přál tak, ať mi to funguje v místnosti o velikosti cca 5×5 m..
Účastníkco to je panel na ruku?
Nepíše do jaké vzdálenosti a jak složitou potřebuješ komunikaci.
Pro jednoduché řešení se používají moduly 433MHz
http://arduino8.webnode.cz/news/lekce-20-arduino-a-vyuziti-433-92-mhz/pro složitější bluetooth nebo Xbee ten je ještě v provedení silver a gold
http://arduino8.webnode.cz/news/lekce-20-arduino-a-vyuziti-433-92-mhz/případně moduly na 2,4GHz tuším že s čipem NRF24L01 např:
https://arduino-info.wikispaces.com/Nrf24L01-2.4GHz-HowTokončit můžeš u wifi řešení. Využít vlastní wifi síť, z 1 arduina udělat miniserver, který bude generovat obsah HTML stránky a ostatní jej pak jen dekodují.
tribal.cz
ÚčastníkNemáš za co, hlavně si pročti datasheet daného tranzistoru. Ne vždy je to stejné.
ÚčastníkMockrát děkuju za hezký popis! Vyměním teda zdroj za 9V a zkusím to s tím tranzistorem.
terje
ÚčastníkDík za odpověď, ale asi jsem to upravil špatně (zatím v tom tápu). Podívej se na to, prosím Tě, až budeš mít čas.
/*
* This sketch sends data via HTTP GET requests to data.sparkfun.com service.
*
* You need to get streamId and privateKey at data.sparkfun.com and paste them
* below. Or just customize this script to talk to other HTTP servers.
*
*/#include <ESP8266WiFi.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#include <stdlib_noniso.h>#define ONE_WIRE_BUS 2 // DS18B20 pin
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature DS18B20(&oneWire);const char* ssid = „terje“;
const char* password = „xxxx“;const char* host = „api.thingspeak.com“;
const char* APIkey = „xxxxxxx“;float oldTemp;
void setup() {
Serial.begin(115200);
delay(10);// We start by connecting to a WiFi network
Serial.println();
Serial.println();
Serial.print(„Connecting to „);
Serial.println(ssid);WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(„.“);
}Serial.println(„“);
Serial.println(„WiFi connected“);
Serial.println(„IP address: „);
Serial.println(WiFi.localIP());
}void loop() {
delay(30000);float temp;
DS18B20.requestTemperatures();
temp0 = DS18B20.getTempCByIndex(0); // první čidlo
temp1 = DS18B20.getTempCByIndex(1); // druhé čidlo
Serial.print(„Temperature: „);
Serial.println(temp);
char buf[24];
String strTemp0 = dtostrf(temp0, 6, 2, buf);
String strTemp1 = dtostrf(temp1, 6, 2, buf);Serial.print(„connecting to „);
Serial.println(host);// Use WiFiClient class to create TCP connections
WiFiClient client;
const int httpPort = 80;
if (!client.connect(host, httpPort)) {
Serial.println(„connection failed“);
return;
}// We now create a URI for the request
String url = „/update?key=“;
url += „&field1=“;
url += strTemp0; //String(temp0);
url += „&field2=“;
url += strTemp1; //String(temp1);
url += charVal;//String(temp);Serial.print(„Requesting URL: „);
Serial.println(url);// This will send the request to the server
client.print(String(„GET „) + url + “ HTTP/1.1\r\n“ +
„Host: “ + host + „\r\n“ +
„Connection: close\r\n\r\n“);
delay(10);// Read all the lines of the reply from server and print them to Serial
while (client.available()) {
String line = client.readStringUntil(‚\r‘);
Serial.print(line);
}Serial.println();
Serial.println(„closing connection“);
}Chybová zpráva:
Arduino: 1.6.7 (Windows 7), Vývojová deska: „NodeMCU 1.0 (ESP-12E Module), 80 MHz, Serial, 115200, 4M (3M SPIFFS)“
Volby pro sestavení se změnily; sestavuji vše znovu
sketch_feb25a:88: error: stray ‚\204‘ in programurl += „&field1=“;
^
sketch_feb25a:88: error: stray ‚\223‘ in program
sketch_feb25a:90: error: stray ‚\204‘ in program
url += „&field2=“;
^
sketch_feb25a:90: error: stray ‚\223‘ in program
C:\Users\terje\AppData\Local\Temp\arduino_128afa9af2287aba088309aaca1e436f\sketch_feb25a.ino: In function ‚void loop()‘:
sketch_feb25a:63: error: ‚temp0‘ was not declared in this scope
temp0 = DS18B20.getTempCByIndex(0); // první čidlo
^
sketch_feb25a:64: error: ‚temp1‘ was not declared in this scope
temp1 = DS18B20.getTempCByIndex(1); // druhé čidlo
^
sketch_feb25a:88: error: ‚field1‘ was not declared in this scope
url += „&field1=“;
^
sketch_feb25a:88: error: expected primary-expression before ‚;‘ token
url += „&field1=“;
^
sketch_feb25a:90: error: ‚field2‘ was not declared in this scope
url += „&field2=“;
^
sketch_feb25a:90: error: expected primary-expression before ‚;‘ token
url += „&field2=“;
^
sketch_feb25a:92: error: ‚charVal‘ was not declared in this scope
url += charVal;//String(temp);
^
exit status 1
stray ‚\204‘ in programTento výpis by měl více informací s
„Zobrazit více informací během kompilace“
povoleno v Soubor > VlastnostiÚčastníkAno tranzistorem si pouze sepneš potřebné. Pokusím se ti to popsat a ještě ti dám odkaz na itnetwork.cz kde je o tom článek takže. K rozsvícení využiješ jiný externí zdroj, arduinem budeš jen spínat. Tranzistor má tři vývody báze, colector a emitor.Bázi připojíš na nějaký pin třeba 5, emitor dáš na GND vývod diody a colector na GND zdroje. Mezi bázi a arduino si ještě bouchni diodu jako pojistku proti proražení tranzistoru. Takovýto obvod je bezpečný, poté si stačí jen nějaký kód. Třeba upravený příklad BLINK z arduino IDE
void setup() { pinMode(5, OUTPUT); } void loop() { digitalWrite(5, HIGH); delay(1000); digitalWrite(5, LOW); delay(1000); }Tady máš ještě ten odkaz je to tam i schéma tak to líp pochopíš než z mého popisu
Edit: promiň zapomněl jsem odkaz 😀 http://www.itnetwork.cz/hardware-pc/arduino/arduino-spinani-velke-zateze
Účastníkok hlavní je spokojenost .)
Účastníkintegrovaný obvod nebli šváb je jen shluk zsiučástek v 1 pouzdru a převládá tam saoučástka zvanaá tranzistor. Když nepochopíš tranzitor tak tě šváb nevytrhně….
Navíc bylo určutě myšleno tranzistor jako spínač. Žádné v/a charakteristiky, žádný pracovní bod, jen zapni vynpi.ÚčastníkBohužel tranzistor je součástka, kterou asi nejsem schopnej pochopit 🙁 Učitel byl debil, co by snad nedokázal vysvětlit ani funkci rezistoru a všechny mé pokusy o samostudium zatím skončily krachem. Za to jsme měli skvělého učitele na číslicovku, proto mě napadlo řešení nějakým švábem 🙂
-
AutorPříspěvky