
nicolasoto
Vytvořené odpovědi
-
AutorPříspěvky
-
Aleš
Účastník1. Zkuste to na jiném počítači.
2. Zkuste připojit do Arduina externí napájení. W5100 má odběr jako kr..a, je možné že to USB neutáhne.Zbyšek Voda
ÚčastníkNenapadá mě, kde by mohl být problém.
Navíc se mi nedaří najít jakékoliv info od výrobce (kromě nějakého fóra v čínštině). Možná by se dalo najít něco tam…pms
Účastníkpřesně tento ovladač mám nainstalovaný. Přesto jsem zadal aktualizovat. Problém (dle očekávání) trvá.
ÚčastníkZkus tohle:
http://arduino8.webnode.cz/news/lekce-9-merime-vzdalenost-s-hc-sr04/Pokud to nebude fungovat, je senzor vadný.
Účastník.
ÚčastníkDobrý den,
zkuste ještě tady: http://www.arduined.eu/ch340g-converter-windows-7-driver-download/ stáhnout driver pro CH340G.
V ovládacích panelech otevřete Správce zařízení, připojte Arduino a mělo by se vám někde objevit. Pak kliknete pravým a zvolíte Aktualizovat systém ovladače. Poté doveďte instalační program na stažené drivery.
Potom zkuste znovu programování Arduina v IDE.
jaracim
ÚčastníkNikdo neměl tento problém ?
daflik
ÚčastníkProblém je v tom že když stáhnu a nainstaluju arduino 1.6.5.r2- windows nenajdu tam složku arduino UNO inf.
Také žádnou plastovou páčku jsem nenašel.ÚčastníkTak se mi povedlo to přečíst:Proti obrázku je to poloviční, musel jsem si udělat dalekohled, ale je to:
ATMEL, MEGA 1602 ,/nebo 16u2/, 1452 TM A28 TNB
díkyÚčastníkÚčastníkPošlete mi prosím odkaz na ebay, kde jste to koupil
Účastníkpři odpojení Arduina položka Porty zmizí
ÚčastníkZobrazuje se vám něco ve Správci zařízení/Porty i když není Arduino připojeno?
Na nastavení Programátor bych nesahal a nechal tam původní.
Účastníkkdyz zvolim Vývojová deska:“Arduino UNO“, chová se to stejně.
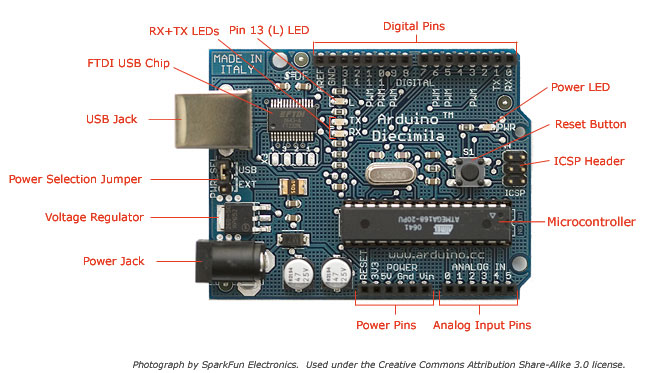
Co má být v Nástroje | Programátor?ÚčastníkTam kde je na tomto obrázku šipka USB FTDI
https://www.arduino.cc/en/uploads/Main/ArduinoDiecimilaComponents.jpg
jaký čip tam máte vy?
ÚčastníkJo už vím vy myslíte: J16.000 asi piko /nečit/.
ÚčastníkDobrý den,
a když v Tools/Boards vyberete Arduino UNO, tak se to nepovede?
ÚčastníkNyní mi bliká Light, a TX u grundu digitálního. 🙂
ÚčastníkMyslíte TX RX.
ÚčastníkJaký typ USB-serial převodníku máte?
Je to ten malý čip blízko USB – co se na něm píše?ÚčastníkÚčastníkDobrý den, podívejte se na mail. Máte tam odkaz na Ebook 🙂
ÚčastníkDobrý den,
jaký máte typ desky? Můžete nasdílet odkaz výrobce, popřípadě odkud jste desku pořídil?ÚčastníkJak tu dám něco?….
ÚčastníkMám podobný problém: mám COM3. Porty COM a LPT byly ale zase zmizely, s tímto vaším ovladačem se mi to alespoň objevilo objevilo v neznámém, ale ani váš ovladač nejede…. Jaroněk
tomasbiesok
ÚčastníkUkázalo se, že problém je někde v SW. Dokud se nenabootuje OS, tak program v Arduinu jede bez problému (bez samovolných restartu). Zkusil jsem změnit ve Správci zařízení COM port Arduina z COM3 na COM4, ale v tom to nebylo. Ještě tam je možnost „Používat vyrovnávací paměť FIFO“, ale ani změna tohohle nastavení nic nepomohla.
hefi
ÚčastníkZkus vlézt do BIOSu a pak nechat běžet Arduino. Pokud se restartuje, je tam nějaká HW chyba USB. Pokud je vše OK, bude to chyba nějakého SW, že třeba šťouchá do USB, jestli nemá připojené zařízení, Arduino to pochopí jako komunikaci po sériové lince, při kterém si provede Reset (je to standardní divná vlastnost Arduina).
dejwak
ÚčastníkDobrý den,
mám ledky k pinům 9 a 10, servo je připojené na pin 8. Zkoušel jsem to prohazovat a například na pinech 4 a 5 mi ani servo neblbne a ani ledky neblikají.ÚčastníkDobrý den,
k jakým pinům máte LEDky a servo připojené?
ÚčastníkPo menším zkoumání jsem zjistil, že tyhle samovolné restarty se dějí pouze, když je arduino připojeno k některému z USB na mém notebooku. Když jej připojím do USB u stolního PC nebo napájecího zdroje, je vše v pořádku. Měřil jsem napětí na USB konektoru a to bylo také v pohodě. Jiné zařízení (Flash, externí HDD,…) na noťasu fungují také bez problému… I kabel k připojení arduina je v pohodě… Má někdo nějaký nápad, v čem by stále mohl být problém? 😀
-
AutorPříspěvky
{kind=link}