Vojtěch Vosáhlo
Vytvořené odpovědi
-
AutorPříspěvky
-
 Vojtěch VosáhloÚčastník
Vojtěch VosáhloÚčastníkJasně, těším se.
Vojtěch VosáhloÚčastníkTa polovina má být mezi dvěma rezistory 😀 posunulo se to
Vojtěch VosáhloÚčastník😀 Tak to bude asi nejlepší, tady je link na kalkulačku pro odpory Voltage divider ale prakticky když dáte do série 2 stejné odpory, mezi nimi je polovina napětí které do nich pouštíte.
napětí z blinkru —-| R1 |——| R2 |—- GND
|
|
polovina napětí blinkruSamozřejmě čím větší je rozdíl v odporu mezi oběma rezistory, tím menší napětí je uprostřed. Nevím kolik má blinkr, asi 12V , takže R1 musí být 2x odpor R2 –> dostanete asi 4 volty uprostřed.
Vojtěch VosáhloÚčastníkMůžu jen vědět jak jste to nakonec vyřešil s napájením a spínáním? Použijete lm nebo…?
Vojtěch VosáhloÚčastníkPardon, zapoměl jsem tam komentář 😉
Takhle je to správně.void colorWipe(byte red, byte green, byte blue, int SpeedDelay, int pasek) { if(pasek == 0){ for(uint16_t i=0; i<NUM_LEDS_L_PASEK; i++) { setPixelL_PASEK(i, red, green, blue); showL_PASEK(); delay(SpeedDelay); } } f(pasek == 1){ for(uint16_t i=0; i<NUM_LEDS_P_PASEK; i++) { setPixelP_PASEK(i, red, green, blue); showP_PASEK(); delay(SpeedDelay); } } }Vojtěch VosáhloÚčastníkmam doma 7805 muzu pouzit?
Jak budete arduino napájet? LM7805 je regulátor napětí určený pro stabilizaci napájecího napájení, né pro snížení. Asi by se použít dal ale je to hodně zbytečné. Pokud máte po ruce 4 rezistory o stejné hodnotě, nemá cenu vymýšlet nic jiného.
Tento kód by měl fungovat, nahoře akorát specifikujte ty piny a počty led. Kdyby to nešlo, ozvěte se.
#include <Adafruit_NeoPixel.h> ////// NASTAVENI LEVEHO PASKU #define PIN_L_PASEK pin l pasku #define NUM_LEDS_L_PASEK pocet led l pasku Adafruit_NeoPixel l_pasek = Adafruit_NeoPixel(NUM_LEDS_L, PIN_L_PASEK, NEO_GRB + NEO_KHZ800); ////// NASTAVENI PRAVEHO PASKU #define PIN_P_PASEK pin p pasku #define NUM_LEDS_P_PASEK pocet led p pasku Adafruit_NeoPixel p_pasek = Adafruit_NeoPixel(NUM_LEDS_P, PIN_P_PASEK, NEO_GRB + NEO_KHZ800); ////// NASTAVENI VSTUPNICH PINU #define L_BLINKR_PIN vstup z l blinkru #define P_BLINKR_PIN vstup z p blinkru void setup() { /// Nastaveni pinu na ktere pujdou vstupy/ blinkry pinMode(L_BLINKR_PIN, INPUT); pinMode(R_BLINKR_PIN, INPUT); ///Nastaveni pasku l_pasek.begin(); l_pasek.show(); p_pasek.begin(); p_pasek.show(); } void loop() { if(digitalRead(P_BLINKR_PIN)) { colorWipe(0xff,0xa2,0x00, 40, 1); colorWipe(0x00,0x00,0x00, 5, 1); } if(digitalRead(L_BLINKR_PIN)) { colorWipe(0xff,0xa2,0x00, 40, 0); colorWipe(0x00,0x00,0x00, 5, 0); } } void colorWipe(byte red, byte green, byte blue, int SpeedDelay, int pasek /// 0 = levy pasek / 1 = pravy pasek) { if(pasek == 0){ for(uint16_t i=0; i<NUM_LEDS_L_PASEK; i++) { setPixelL_PASEK(i, red, green, blue); showL_PASEK(); delay(SpeedDelay); } } if(pasek == 1){ for(uint16_t i=0; i<NUM_LEDS_P_PASEK; i++) { setPixelP_PASEK(i, red, green, blue); showP_PASEK(); delay(SpeedDelay); } } } void showL_PASEK() { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel l_pasek.show(); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED FastLED.show(); #endif } void setPixel_L_PASEK(int Pixel, byte red, byte green, byte blue) { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel l_pasek.setPixelColor(Pixel, l_pasek.Color(red, green, blue)); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED leds[Pixel].r = red; leds[Pixel].g = green; leds[Pixel].b = blue; #endif } void showP_PASEK() { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel p_pasek.show(); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED p_pasek.show(); #endif } void setPixel_P_PASEK(int Pixel, byte red, byte green, byte blue) { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel p_pasek.setPixelColor(Pixel, p_pasek.Color(red, green, blue)); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED leds[Pixel].r = red; leds[Pixel].g = green; leds[Pixel].b = blue; #endif }Vojtěch VosáhloÚčastníkAhoj,
na snížení napětí se dá použít spousta věcí, nejjednoduší by byl asi obyčejný napěťový dělič ze 2 rezistorů, pak je taky možnost použít nějaký tranzistor, relé a nebo třeba nějaký optočlen. Chcete brát signál od blinkru, bylo by to od žárovky nebo od samotné páky? -> U páky dostaneme zap/vyp, u žárovky rovnou blikání… Dá se pracovat s obojím.Předpokládám že tyto funkce spouští animaci samotnou, poté by se hlavní smyčka upravila takto:
void loop() { if(digitalRead(Pin Na ktery Jde Signal)) { colorWipe(0xff,0xa2,0x00, 40); colorWipe(0x00,0x00,0x00, 5); } }A do void setup přidáte
pinMode(Pin Na ktery Jde Signal, INPUT);To by mělo stačit.
Držím palce
Vojtěch VosáhloÚčastníkTeda preset je jedno který tam je… A v arduinu musí být program arduino as isp.
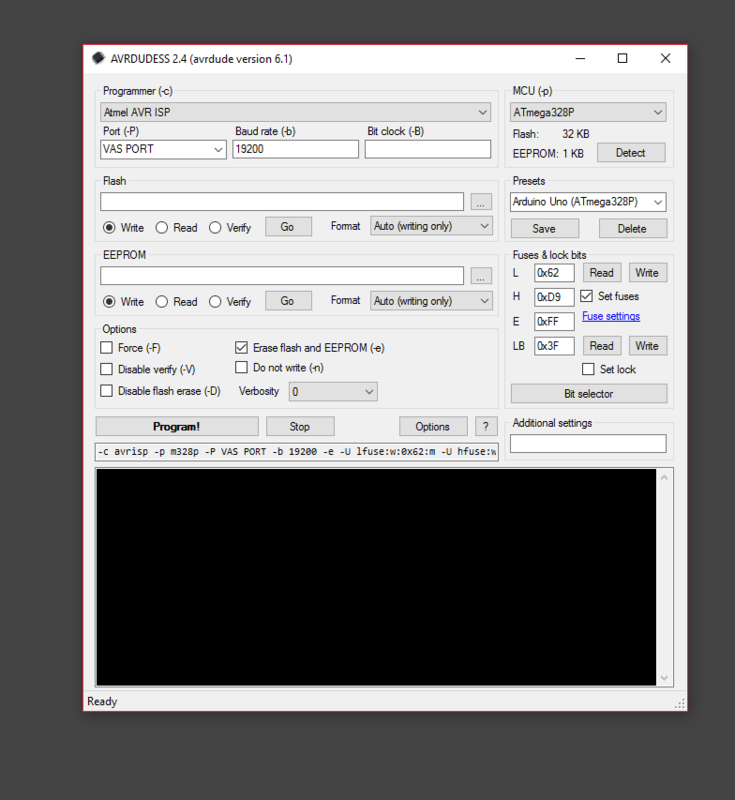
Vojtěch VosáhloÚčastníkJde to pomocí arduina v avrdudess, nastavte VŠE jako na obrázku, ať je to jak kopie, to by mělo čip kompletně smazat ale smaže to i bootloader a čip poběží na interních 8 mhz.
Pokud ho chcete na externích 16mhz tak je nastavení pojistek takto:L: FF
H: D9
E: FFPotom klikněte dole na PROGRAM

Attachments:
Vojtěch VosáhloÚčastníkDobře že se alespoň detekují, všechny jsou nastaveny na ext. krystal > než 8 mhz a ty pojistky všechny vypadají že jsou poupravené. To by znamenalo že do všech se bootloader nahrál. Nevíte s jakou verzí arduino ide jste zkoušel ten čip co má jiné LB? Možná by pak bylo dobré všechny čipy zresetovat a vypálit do nich bootloader znovu pomocí nového IDE ale trochu se bojím aby pak nebyl opět problém s tím se k nim dostat…
Zapojení se sériovou linkou by mělo být jako na tomhle obrázku, http://www.directupload.net/file/d/3883/4hymfghj_png.htm, a na procesoru musíte mít 10k rezistor mezi 5v a RST.
Nastavení v arduino IDE nechte asi jako pro arduino Uno desku, Programátor Avr ISP a Deska Arduino UNO. Ale netuším jestli to poběží, v tom se nevyznám…
Vojtěch VosáhloÚčastníkMoje chyba, teda předpokládám, na zapojení se ser. linkou je to ok.
Když jsem připojil převodník do USB a jeho RX,TX jsem připojil (křížem) k čipu (nahraný bootloader pomocí opitloaderu), skončilo to chybou. Když jsem to stejné udělal s arduino UNO deskou, tedy RX a TX jsem připojil na piny 0, 1, tak to také hodilo desku přičemž arduino normálně funguje. Takže mi ten převodník asi nefunguje správně.
Arduino, jak jsem se dočetl a nevěděl, běží přes bit banging. Zjednodušeně právě to že použijete DTR, RTS, CTS a TX jako piny v SPI. Takže jen přes RX a TX se k čipu nedostanete. Za to se omlouvám. Programátor by měl být ůplně v pořádku.
Když zapojím čip podle ISP zapojení – zkusím detekovat v avrdudess, napíše mi to chybu (Unknown signature 000000(retrying)), pokud odendám čip vypíše chybu (Unknown signature FFFFFF(retrying)).
Když nastavím programátor Arudino (v avrdudess), nastavím správný port a baud rate na 115200, detekuje mi to desku arduina, když si přečtu fuse, tak mi to napíše že jsou nastavené na:
L = 0x00
H = 0x00
E = 0x00
LB = 0x00Ten podpis zařízení 000000 nebo FFFFFF prakticky znamená to že je něco špatně v komunikaci, a nebo že čip do kterého se chcete dostat neběží třeba na správné frekvenci.
Ty pojistky arduina jsou normální, bootloadery většinou blokují čtení těchto pojistek.
Zkuste možná ještě kód dole, s nějakým z čipů co nefungovaly, je to poupravené arduino as ISP. Nahrajte do arduina, pak jděte do avrdudess, Programmer = Atmel AVR ISP Baud rate = 19200 a Port vašeho arduina a zkuste dát detect.
Když to čip nenajde, pokud máte přístup k 8mhz krystalu, vyměňte 16mhz za 8, pokud ne, odpojte krystal a kondíky a dejte pin 9 arduina na pin xtal 1. Zkuste znovu. Pokud pořád nic, posuňte čip na prototypové desce, zkuste jiné piny, jestli není na desce nějaký vadný kontakt.// this sketch turns the Arduino into a AVRISP // using the following pins: // 10: slave reset // 11: MOSI // 12: MISO // 13: SCK // Put an LED (with resistor) on the following pins: // 8: Error - Lights up if something goes wrong (use red if that makes sense) // A0: Programming - In communication with the slave // 6: Heartbeat - shows the programmer is running (removed, see notes below) // Optional - Piezo speaker on pin A3 // // October 2009 by David A. Mellis // - Added support for the read signature command // // February 2009 by Randall Bohn // - Added support for writing to EEPROM (what took so long?) // Windows users should consider WinAVR's avrdude instead of the // avrdude included with Arduino software. // // January 2008 by Randall Bohn // - Thanks to Amplificar for helping me with the STK500 protocol // - The AVRISP/STK500 (mk I) protocol is used in the arduino bootloader // - The SPI functions herein were developed for the AVR910_ARD programmer // - More information at http://code.google.com/p/mega-isp // // March 2012 - William Phelps // modify to work with Arduino IDE 1.0 which has a shorter serial port receive buffer // getEOP() now gets entire request before avrisp() is called to process it // Serial.print((char) xxx) changed to Serial.write(xxx) // uint8_t changed to byte // added support for Piezo speaker // moved Pmode LED to A0 // removed "heartbeat" on pin 6, added short blip of ERROR LED instead // Why is it that PROG_FLASH and PROG_DATA don't actually do anything??? // Tested with Arduino IDE 22 and 1.0 // IDE 22 - 5148 bytes // IDE 1.0 - 5524 bytes! // SLOW SPEED CHIP ERASE AND FUSE BURNING // // Enable LOW_SPEED to allow you to erase chips that would fail otherwise, // for being running with a clock too slow for the programmer. // // This allowed me to recover several ATMega328 that had no boot loader and the // first instruction was to set the clock to the slowest speed. Usually this // kind of recovery requires high voltage programming, but this trick will do // just fine. // // How to proceed: // 1. Enable LOW_SPEED, and load it to the programmer. // 2. Erase and burn the fuses on the target uC. Example for ATMega328: // arduino-1.0.1/hardware/tools/avrdude -Carduino-1.0.1/hardware/tools/avrdude.conf -patmega328p -cstk500v1 -P /dev/serial/by-id/usb-FTDI_FT232R_USB_UART_A900cf1Q-if00-port0 -b19200 -e -Ulock:w:0x3F:m -Uefuse:w:0x05:m -Uhfuse:w:0xDA:m -Ulfuse:w:0xF7:m // 3. Comment LOW_SPEED and load it back to the programmer. // 4. Program the target uC as usual. Example: // arduino-1.0.1/hardware/tools/avrdude -Carduino-1.0.1/hardware/tools/avrdude.conf -patmega328p -cstk500v1 -P /dev/serial/by-id/usb-FTDI_FT232R_USB_UART_A900cf1Q-if00-port0 -b19200 -Uflash:w:firmware.hex:i // // Note 1: EXTRA_SPI_DELAY was added to let you slow down SPI even more. You can // play with the value if it does not work with the default. // Note 2: LOW_SPEED will alow you only to erase the chip and burn the fuses! It // will fail if you try to program the target uC this way! #define LOW_SPEED #ifdef LOW_SPEED #define EXTRA_SPI_DELAY 125 #else #define EXTRA_SPI_DELAY 0 #endif #include "pins_arduino.h" // defines SS,MOSI,MISO,SCK #define RESET SS #define LED_ERR 8 #define LED_PMODE A0 //#define LED_HB 6 #define PIEZO A3 #define HWVER 2 #define SWMAJ 1 #define SWMIN 18 // STK Definitions const byte STK_OK = 0x10; const byte STK_FAILED = 0x11; const byte STK_UNKNOWN = 0x12; const byte STK_INSYNC = 0x14; const byte STK_NOSYNC = 0x15; const byte CRC_EOP = 0x20; //ok it is a space... const byte STK_GET_SYNC = 0x30; const byte STK_GET_SIGNON = 0x31; const byte STK_GET_PARM = 0x41; const byte STK_SET_PARM = 0x42; const byte STK_SET_PARM_EXT = 0x45; const byte STK_PMODE_START = 0x50; const byte STK_PMODE_END = 0x51; const byte STK_SET_ADDR = 0x55; const byte STK_UNIVERSAL = 0x56; const byte STK_PROG_FLASH = 0x60; const byte STK_PROG_DATA = 0x61; const byte STK_PROG_PAGE = 0x64; const byte STK_READ_PAGE = 0x74; const byte STK_READ_SIGN = 0x75; //// TONES ========================================== //// Start by defining the relationship between //// note, period, & frequency. //#define c 3830 // 261 Hz //#define d 3400 // 294 Hz //#define e 3038 // 329 Hz //#define f 2864 // 349 Hz //#define g 2550 // 392 Hz //#define a 2272 // 440 Hz //#define b 2028 // 493 Hz //#define C 1912 // 523 Hz //void pulse(int pin, int times); int error=0; int pmode=0; // address for reading and writing, set by STK_SET_ADDR command int _addr; byte _buffer[256]; // serial port buffer int pBuffer = 0; // buffer pointer int iBuffer = 0; // buffer index byte buff[256]; // temporary buffer boolean EOP_SEEN = false; void setup() { Serial.begin(19200); pinMode(PIEZO, OUTPUT); beep(1700, 40); EOP_SEEN = false; iBuffer = pBuffer = 0; pinMode(LED_PMODE, OUTPUT); pulse(LED_PMODE, 2); pinMode(LED_ERR, OUTPUT); pulse(LED_ERR, 2); // pinMode(LED_HB, OUTPUT); // pulse(LED_HB, 2); pinMode(9, OUTPUT); // setup high freq PWM on pin 9 (timer 1) // 50% duty cycle -> 8 MHz OCR1A = 0; ICR1 = 1; // OC1A output, fast PWM TCCR1A = _BV(WGM11) | _BV(COM1A1); TCCR1B = _BV(WGM13) | _BV(WGM12) | _BV(CS10); // no clock prescale } #define beget16(addr) (*addr * 256 + *(addr+1) ) typedef struct param { byte devicecode; byte revision; byte progtype; byte parmode; byte polling; byte selftimed; byte lockbytes; byte fusebytes; int flashpoll; int eeprompoll; int pagesize; int eepromsize; int flashsize; } parameter; parameter param; // this provides a heartbeat on pin 6, so you can tell the software is running. //byte hbval=128; //int8_t hbdelta=4; //void heartbeat() { //// if (hbval > 192) hbdelta = -hbdelta; //// if (hbval < 32) hbdelta = -hbdelta; // if (hbval > 250) hbdelta = -hbdelta; // if (hbval < 10) hbdelta = -hbdelta; // hbval += hbdelta; // analogWrite(LED_HB, hbval); // delay(20); //} void getEOP() { int minL = 0; byte avrch = 0; byte bl = 0; while (!EOP_SEEN) { while (Serial.available()>0) { byte ch = Serial.read(); _buffer[iBuffer] = ch; iBuffer = (++iBuffer)%256; // increment and wrap if (iBuffer == 1) avrch = ch; // save command if ((avrch == STK_PROG_PAGE) && (iBuffer==3)) { minL = 256*_buffer[1] + _buffer[2] + 4; } if ((iBuffer>minL) && (ch == CRC_EOP)) { EOP_SEEN = true; } } if (!EOP_SEEN) { // heartbeat(); // light the heartbeat LED if (bl == 100) { pulse(LED_ERR,1,10); // blink the red LED bl = 0; } bl++; delay(10); } } } // serialEvent not used so sketch would be compatible with older IDE versions //void serialEvent() { // int minL = 0; // byte avrch = 0; // while (Serial.available()>0) // { // byte ch = Serial.read(); // _buffer[iBuffer] = ch; // iBuffer = (++iBuffer)%256; // increment and wrap // if (iBuffer == 1) avrch = ch; // save command // if ((avrch == STK_PROG_PAGE) && (iBuffer==3)) { // minL = 256*_buffer[1] + _buffer[2] + 4; // } // if ((iBuffer>minL) && (ch == CRC_EOP)) { // EOP_SEEN = true; // } // } //} void loop(void) { // is pmode active? // if (pmode) digitalWrite(LED_PMODE, HIGH); // else digitalWrite(LED_PMODE, LOW); digitalWrite(LED_PMODE, LOW); // is there an error? if (error) digitalWrite(LED_ERR, HIGH); else digitalWrite(LED_ERR, LOW); getEOP(); // have we received a complete request? (ends with CRC_EOP) if (EOP_SEEN) { digitalWrite(LED_PMODE, HIGH); EOP_SEEN = false; avrisp(); iBuffer = pBuffer = 0; // restart buffer } } byte getch() { if (pBuffer == iBuffer) { // spin until data available ??? pulse(LED_ERR, 1); beep(1700, 20); error++; return -1; } byte ch = _buffer[pBuffer]; // get next char pBuffer = (++pBuffer)%256; // increment and wrap return ch; } void readbytes(int n) { for (int x = 0; x < n; x++) { buff[x] = getch(); } } //#define PTIME 20 void pulse(int pin, int times, int ptime) { do { digitalWrite(pin, HIGH); delay(ptime); digitalWrite(pin, LOW); delay(ptime); times--; } while (times > 0); } void pulse(int pin, int times) { pulse(pin, times, 50); } void spi_init() { byte x; SPCR = 0x53; #ifdef LOW_SPEED SPCR=SPCR|B00000011; #endif x=SPSR; x=SPDR; } void spi_wait() { do { } while (!(SPSR & (1 << SPIF))); } byte spi_send(byte b) { byte reply; #ifdef LOW_SPEED cli(); CLKPR=B10000000; CLKPR=B00000011; sei(); #endif SPDR=b; spi_wait(); reply = SPDR; #ifdef LOW_SPEED cli(); CLKPR=B10000000; CLKPR=B00000000; sei(); #endif return reply; } byte spi_transaction(byte a, byte b, byte c, byte d) { byte n; spi_send(a); n=spi_send(b); //if (n != a) error = -1; n=spi_send(c); return spi_send(d); } void replyOK() { // if (EOP_SEEN == true) { if (CRC_EOP == getch()) { // EOP should be next char Serial.write(STK_INSYNC); Serial.write(STK_OK); } else { pulse(LED_ERR, 2); Serial.write(STK_NOSYNC); error++; } } void breply(byte b) { if (CRC_EOP == getch()) { // EOP should be next char Serial.write(STK_INSYNC); Serial.write(b); Serial.write(STK_OK); } else { Serial.write(STK_NOSYNC); error++; } } void get_parameter(byte c) { switch(c) { case 0x80: breply(HWVER); break; case 0x81: breply(SWMAJ); break; case 0x82: breply(SWMIN); break; case 0x93: breply('S'); // serial programmer break; default: breply(0); } } void set_parameters() { // call this after reading paramter packet into buff[] param.devicecode = buff[0]; param.revision = buff[1]; param.progtype = buff[2]; param.parmode = buff[3]; param.polling = buff[4]; param.selftimed = buff[5]; param.lockbytes = buff[6]; param.fusebytes = buff[7]; param.flashpoll = buff[8]; // ignore buff[9] (= buff[8]) //getch(); // discard second value // WARNING: not sure about the byte order of the following // following are 16 bits (big endian) param.eeprompoll = beget16(&buff[10]); param.pagesize = beget16(&buff[12]); param.eepromsize = beget16(&buff[14]); // 32 bits flashsize (big endian) param.flashsize = buff[16] * 0x01000000 + buff[17] * 0x00010000 + buff[18] * 0x00000100 + buff[19]; } void start_pmode() { spi_init(); // following delays may not work on all targets... pinMode(RESET, OUTPUT); digitalWrite(RESET, HIGH); pinMode(SCK, OUTPUT); digitalWrite(SCK, LOW); delay(50+EXTRA_SPI_DELAY); digitalWrite(RESET, LOW); delay(50+EXTRA_SPI_DELAY); pinMode(MISO, INPUT); pinMode(MOSI, OUTPUT); spi_transaction(0xAC, 0x53, 0x00, 0x00); pmode = 1; } void end_pmode() { pinMode(MISO, INPUT); pinMode(MOSI, INPUT); pinMode(SCK, INPUT); pinMode(RESET, INPUT); pmode = 0; } void universal() { // int w; byte ch; // for (w = 0; w < 4; w++) { // buff[w] = getch(); // } readbytes(4); ch = spi_transaction(buff[0], buff[1], buff[2], buff[3]); breply(ch); } void flash(byte hilo, int addr, byte data) { spi_transaction(0x40+8*hilo, addr>>8 & 0xFF, addr & 0xFF, data); } void commit(int addr) { spi_transaction(0x4C, (addr >> 8) & 0xFF, addr & 0xFF, 0); } //#define _current_page(x) (here & 0xFFFFE0) int current_page(int addr) { if (param.pagesize == 32) return addr & 0xFFFFFFF0; if (param.pagesize == 64) return addr & 0xFFFFFFE0; if (param.pagesize == 128) return addr & 0xFFFFFFC0; if (param.pagesize == 256) return addr & 0xFFFFFF80; return addr; } byte write_flash(int length) { if (param.pagesize < 1) { return STK_FAILED; } //if (param.pagesize != 64) return STK_FAILED; int page = current_page(_addr); int x = 0; while (x < length) { if (page != current_page(_addr)) { commit(page); page = current_page(_addr); } flash(LOW, _addr, buff[x++]); flash(HIGH, _addr, buff[x++]); _addr++; } commit(page); return STK_OK; } byte write_eeprom(int length) { // here is a word address, so we use here*2 // this writes byte-by-byte, // page writing may be faster (4 bytes at a time) for (int x = 0; x < length; x++) { spi_transaction(0xC0, 0x00, _addr*2+x, buff[x]); delay(45); } return STK_OK; } void program_page() { byte result = STK_FAILED; int length = 256 * getch() + getch(); if (length > 256) { Serial.write(STK_FAILED); error++; return; } char memtype = (char)getch(); // for (int x = 0; x < length; x++) { // buff[x] = getch(); // } readbytes(length); if (CRC_EOP == getch()) { Serial.write(STK_INSYNC); switch (memtype) { case 'E': result = (byte)write_eeprom(length); break; case 'F': result = (byte)write_flash(length); break; } Serial.write(result); if (result != STK_OK) { error++; } } else { Serial.write(STK_NOSYNC); error++; } } byte flash_read(byte hilo, int addr) { return spi_transaction(0x20 + hilo * 8, (addr >> 8) & 0xFF, addr & 0xFF, 0); } char flash_read_page(int length) { for (int x = 0; x < length; x+=2) { byte low = flash_read(LOW, _addr); Serial.write( low); byte high = flash_read(HIGH, _addr); Serial.write( high); _addr++; } return STK_OK; } char eeprom_read_page(int length) { // here again we have a word address for (int x = 0; x < length; x++) { byte ee = spi_transaction(0xA0, 0x00, _addr*2+x, 0xFF); Serial.write( ee); } return STK_OK; } void read_page() { byte result = (byte)STK_FAILED; int length = 256 * getch() + getch(); char memtype = getch(); if (CRC_EOP != getch()) { Serial.write(STK_NOSYNC); return; } Serial.write(STK_INSYNC); if (memtype == 'F') result = flash_read_page(length); if (memtype == 'E') result = eeprom_read_page(length); Serial.write(result); return; } void read_signature() { if (CRC_EOP != getch()) { Serial.write(STK_NOSYNC); error++; return; } Serial.write(STK_INSYNC); byte high = spi_transaction(0x30, 0x00, 0x00, 0x00); Serial.write(high); byte middle = spi_transaction(0x30, 0x00, 0x01, 0x00); Serial.write(middle); byte low = spi_transaction(0x30, 0x00, 0x02, 0x00); Serial.write(low); Serial.write(STK_OK); } ////////////////////////////////////////// ////////////////////////////////////////// //////////////////////////////////// //////////////////////////////////// int avrisp() { byte data, low, high; byte avrch = getch(); switch (avrch) { case STK_GET_SYNC: // get in sync replyOK(); break; case STK_GET_SIGNON: // get sign on if (getch() == CRC_EOP) { Serial.write(STK_INSYNC); Serial.write("AVR ISP"); Serial.write(STK_OK); } break; case STK_GET_PARM: // 0x41 get_parameter(getch()); break; case STK_SET_PARM: // 0x42 readbytes(20); set_parameters(); replyOK(); break; case STK_SET_PARM_EXT: // extended parameters - ignore for now readbytes(5); replyOK(); break; case STK_PMODE_START: // 0x50 beep(2272, 20); start_pmode(); replyOK(); break; case STK_PMODE_END: //0x51 beep(1912, 50); error=0; end_pmode(); replyOK(); break; case STK_SET_ADDR: // 0x55 _addr = getch() + 256 * getch(); replyOK(); break; case STK_UNIVERSAL: //UNIVERSAL 0x56 universal(); break; case STK_PROG_FLASH: //STK_PROG_FLASH ??? low = getch(); high = getch(); replyOK(); break; case STK_PROG_DATA: //STK_PROG_DATA ??? data = getch(); replyOK(); break; case STK_PROG_PAGE: //STK_PROG_PAGE // beep(1912, 20); program_page(); break; case STK_READ_PAGE: //STK_READ_PAGE read_page(); break; case STK_READ_SIGN: //STK_READ_SIGN read_signature(); break; // expecting a command, not CRC_EOP // this is how we can get back in sync case CRC_EOP: Serial.write(STK_NOSYNC); break; // anything else we will return STK_UNKNOWN default: if (CRC_EOP == getch()) Serial.write(STK_UNKNOWN); else Serial.write(STK_NOSYNC); } } // beep without using PWM void beep(int tone, long duration){ long elapsed = 0; while (elapsed < (duration * 10000)) { digitalWrite(PIEZO, HIGH); delayMicroseconds(tone / 2); digitalWrite(PIEZO, LOW); delayMicroseconds(tone / 2); // Keep track of how long we pulsed elapsed += tone; } }Vojtěch VosáhloÚčastníkNevím jestli je to opět chyba jen v obrázku, ale to zapojení je zase špatně, na straně u krystalu je 7,8 Vcc Gnd a 9, 10 krystal. Zkuste to opět opravit. Arduino zkusím na večer a napíšu.
Vojtěch VosáhloÚčastníkTeď jsem ještě experimentoval, přehrál jsem s normálním programátorem pojistky v tom mega88pa a najednou vše běží i na arduinu. Je taky možné že jsem měl nějaké špatné kontakty protože čip jsem teď dal přímo na breadboard. A taky jsem vrátil zpět 10k rezistor… Myslím že asi nepochodíte se žádným návodem co jsem tu hodil. Pokud chcete čipy rozběhat, pořídil bych si nějaký pořádný programátor. Jak už jsem tu párkrát zmínil, já mám USBasp a nemůžu si ztěžovat. Navíc z alliexpresu nebo ebaye je asi za 2 dolary. To bych viděl jako řešení, pokud s tím programováním nespěcháte… Pokud jde o čas, možná bych prostě chvíli „spamoval“ tlačítko nahrát zavaděč a třeba se pojistky přepnou 😀
Vojtěch VosáhloÚčastníkNa nastavení pojistek se dá použít i arduino, viz.http://www.instructables.com/id/How-to-change-fuse-bits-of-AVR-Atmega328p-8bit-mic/step2/Understanding-Fuse-bits-from-datasheet/, vás by to zajímalo až od kroku 4. Mimochodem v tomto tutoriálu je kndenzátor mezi vcc a resetem arduina, očividně taky možnost. Ale většina kroků tam popsaných je založena na tom že nahrajete do arduina Arduino as ISP kód, a pak pojistky přečtete, nebo zapíšete přes avrdude(ss). Tady je ale problém že avrdude čipy nevidí… Pak jsem ještě našel tenhle návod (https://playground.arduino.cc/Code/Programmer2) který by také mohl fungovat, nahodíte do arduina kód na který je tam odkaz, zapojení zůstává, a pak můžete do ser. monitoru arduina odeslat nějaký z jejich příkazů, například *u. Zkoušel jste vypalovat víc verzí firmware, vybírat víc desek když se vám to nevedlo? Každý čip by mohl být jinak vypálený i přes ty chyby jak jsem psal výše.
Vojtěch VosáhloÚčastníkAno, pojistky (fuses) můžou způsobit to že se do čipu nedostanete ale nejsem si jisý jestli jdou smazat přes arduino ale na to se zítra určitě podívám, je velmi malá pravděpodobnost že by byly čipy poškozené. Někde jsem dokonce četl že ide občas vypálí bootloader i přes vyhození všech chyb, možná můžete zkusit připojit „vadné“ čipy do toho zapojení, a zkusit s němy komunikovat přes sériovou linku a jejich rx a tx. Třeba se poštěstí.
Podle toho co optiloader vypsal se nastavily pojistky megy na:
L: FF
H: DE
E: 05
Lock: 3FPokud otevřete avrdudess tak je v pravo možnos na nastavení pojistek, tam kliknete na takový odkaz set fuses a mělo by vyskočit okno prohlížeče. Vyplníte jméno procesoru a dyž sjedete úplně dolů, můžete tam zadat ty hodnoty pojistek co vám vyjely a dát apply values. Když pak vyjedete zpět nahoru měly by všechny možnosti být vyplněné tak jak je nastavený váš procesor a mělo by se dát zjistit na kolik mhz procesor funguje atd. Pokud zjistíte že běží na interních 8mhz, stačí vše poupravit a opět kliknout na apply values, ale pod tím co jste upravoval, ne úplně dole. Když to odkliknete ty hodnoty dole se nastaví podle vašeho nastavení, vy je pak jen přepíšete do avrdudess a dáte write u obou. U lock fuse to nejspíš hodí chybu ale to je normální. U pojistek prakticky není tolik co zkazit, jen to chce dát si pozor na nastavení ISP, kdyby se špatně odkliklo , mohlo by to úplně vypnout isp procesoru a už by jste se do něj nedostal. Zítra kouknu jestli by se daly obnovit ty ostatní procesory a uvidíme.
Hodně štěstí při dalších projektech. -
AutorPříspěvky