
Mapování jezer s Arduino robotem

S neobvyklým způsobem měření hloubky jezer přišel Geir Andersen, když pro tyto účely za pomocí Arduina Duemilanove sestrojil robota s názvem Sea Rendering (název je překvapivě primárně anagramem autorova jména, nikoliv pouze popisem funkce přístroje):
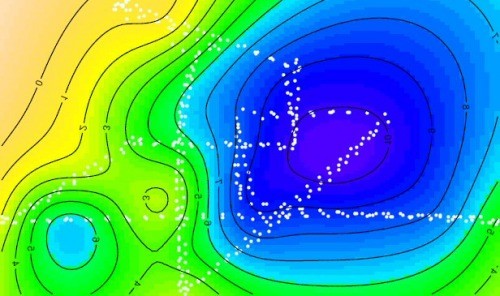
Robot má za úkol zaznamenávat hloubku předem vyznačených bodů, sesbíraná data jsou následně uložena na paměťovou kartu. Doba provozu se obvykle pohybuje okolo 24 hodin, za nejvyšší rychlosti 3km/h tedy Sea Rendering urazí vzdálenost přibližně 72km. Záznamy jsou aktualizovány každých 10m – za jeden přejezd tak naměří bezmála 700 hloubkových bodů, včetně jejich lokace GPS.

Geirův projekt bude brzy uveden na Let’s Make Robots, dobrovolné akci pořádané členy robotické komunity.
Níže si můžete prohlédnout výsledná data z průzkumu norského jezera Riskedalsvatnet, spolu s ukázkou samotného přístroje v akci.
Přeloženo z http://blog.arduino.cc/2015/04/14/lets-make-robots-exploring-lake-depths/

- Teleball: Arduino programování pro retro nadšence - 12.10.2015
- Arduino třídička barevných bonbonů - 30.9.2015
- Výškový meteorologický balon s čichem pro atmosféru - 18.9.2015