
Quadrokoptéra na bázi Arduino Yún

Comelicottero je quadrokoptéra založená na bázi Arduino Yún, kterou vytvořila skupina studentů magisterského studia na Computer Science University degli Studi v Miláně. Jde o projekt Simone Castellani, Giovanni Intorreho a Andrea Toscano:
Naší myšlenkou bylo postavit drone, ovladatelný dálkově pomocí WiFi z libovolného počítače, tabletu, nebo smartphonu. Comelicottero je vybavené akcelerometrem a gyroscopem, pro dosažení stability pomocí ovládání založeného na PID regulátoru. Protože je Servo knihovna moc pomalá pro dynamikou quadrokoptéry, zakomponovali jsme do projektu hardwarový PWM, abychom získali 400Hz PWM signál.
Komunikace mezi stanicí na zemi; PC a quadrokoptérou spoléhá na WiFi, proto aby dosáhla co nejlepších výsledků, zaměnil tým Comelicottero Bridge library za efektivní script pythonu na OpenWRT-Yun. Navíc byl veškerý kód navrhnut tak, aby maximalizoval možnosti Arduino Yún. Navigační systém byl navrhnut pomocí simulace na PC, pak začleněn do zařízení a otestován. Autonomní navigace momentálně prochází dalšími testy, kvůli interferencím magnetometru s magnetickým polem motoru.
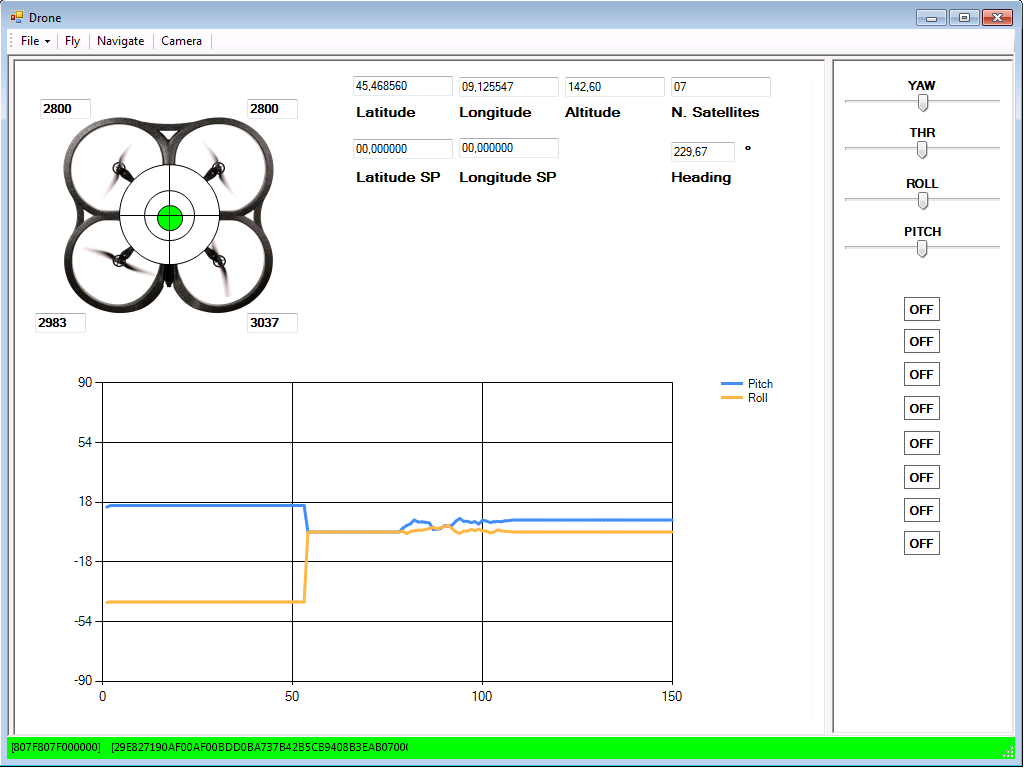
Uživatel může ovládat a monitorovat data přicházející z dronu pomocí gamepadu, připojeného k počítači s nainstalovaným speciálním softwarem.
Nákresy a dokumentace projektu bude brzy dostupná na GitHubu pod GNU licencí. Mezitím můžete sledovat Youtube kánál projektu, abyste nepřišli o žádné novinky.
Přeloženo z http://blog.arduino.cc/2015/06/08/building-a-quadcopter-running-on-arduino-yun/ a mírně upraveno.

fanoušek Open Source