lieg
Vytvořené odpovědi
-
AutorPříspěvky
-
Rabinjakob
Účastníkchlapi díky moc už pálím fakt to chtělo hodit akorát na 11ku pin swrově.. Díkes moc
Zbyšek Voda
ÚčastníkDobrý den, té „děravé desce“ se říká nepájivé kontaktní pole a slouží právě k tvorbě obvodů bez nutnosti pájení.
Po obvodu desky jsou vetšinou piny propojené ve dvou řadách. Poté obsahuje deska „uprostřed“ spoustu sloupců pinů, které jsou vzájemně propojené. Asi nejlépe je princip patrný z obrázku – viz ZDE.
Tedy tím, že zastrkáte nožičky součástek do patřičných sloupců je propojíte a můžete tak sestavovat obvody 🙂
ÚčastníkTady jsou ty fotky .. jinak dobrý nápad asi to skusím ..
posjirka
Účastníka co to uzemnit přes odpor 100R resp. dát na vstup odpor jako ochranný prvek …
Vojtěch Vosáhlo
ÚčastníkNapsal jsem to špatně… Zkusil bych dát 5v na pin označený D12 na té „základové“ desce, pokud se nic nestane tak zkusit pin D11 ten tam neni označený ale domyslíš ho, pokud to nebude fungovat tak kouknout do datasheetu mosfetu a podívat se kde má Gate, na ten pin pak poslat 3.3v a uvidíš.
ÚčastníkHodil sem to klasicky na pin 12 a při vypnutém laseru je nulová dodnota a u zapnutého j necelých 5v
ÚčastníkA když pošleš 5v z napájení desky na pin D12 nebo D11?
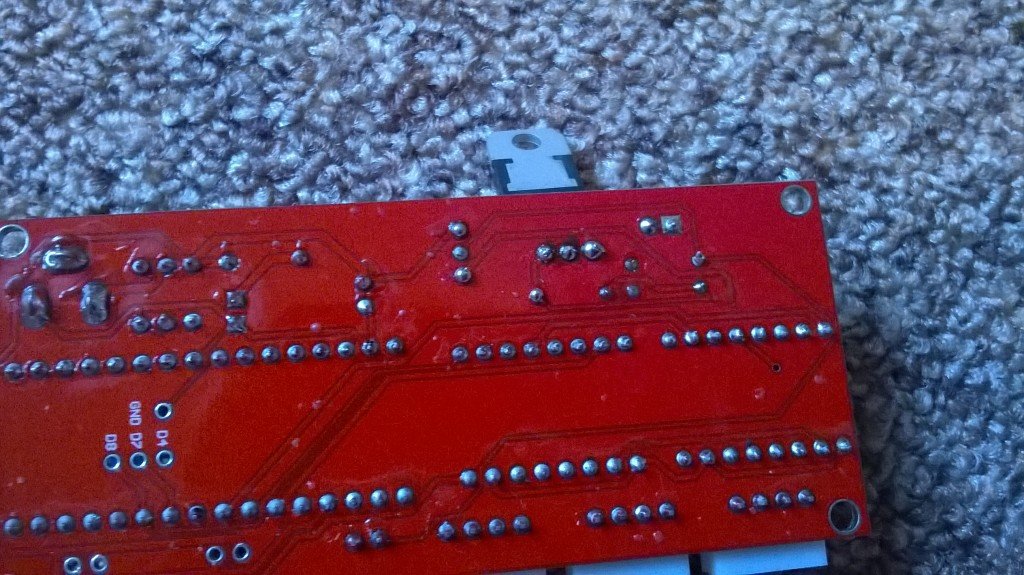
Mimochodem nemohl by si poslat ještě jednu fotku z blízkosti na ten mosfet a přepínač napětí, jako ze spoda kde jsou vidět spoje..Účastníkaudrino je ok ted sem měřil pin 12 a je ok zrada je jinde tzn v druhé desce
ÚčastníkJeště jen tak navíc, zkoušel jsem se podívat do komunikace software s arduinem a když dám zapnout laser vyleze na mě zpráva která obsahuje údaj o intenzitě laseru 0-255 a také nějaký P údaj, konkrétně P0. Teoreticky by tedy sw nemusel poslouchat a mohl by pouštět signál na pin 0 ale to jen tipuju. Kdyby nevyšlo přehození pinu v sw zkus nahrát do arduina ten jednoduchý program který dá pin D12 a radši asi i D11 na jedničku, pak arduino osaď na desku a zapni, laser by měl naskočit 🙂 Jinak prakticky stačí i bez arduina dostat D12 nebo D11 na 5v …
ÚčastníkVarianta č jedna odpadá protože to by mi nejely ani krokové motory a ty reagují skvěle .Nejvíc mně ale zaujala varianta z přehozením pinu to sem chtěl udělat i dřív ale nevěděl sem který můžu použít tak se pokusím o to a pak se uvidí. Zatím díky moc ozvu se co dál.
ÚčastníkPodle těch fotek mě napadá pár věcí které by mohli být problémem.
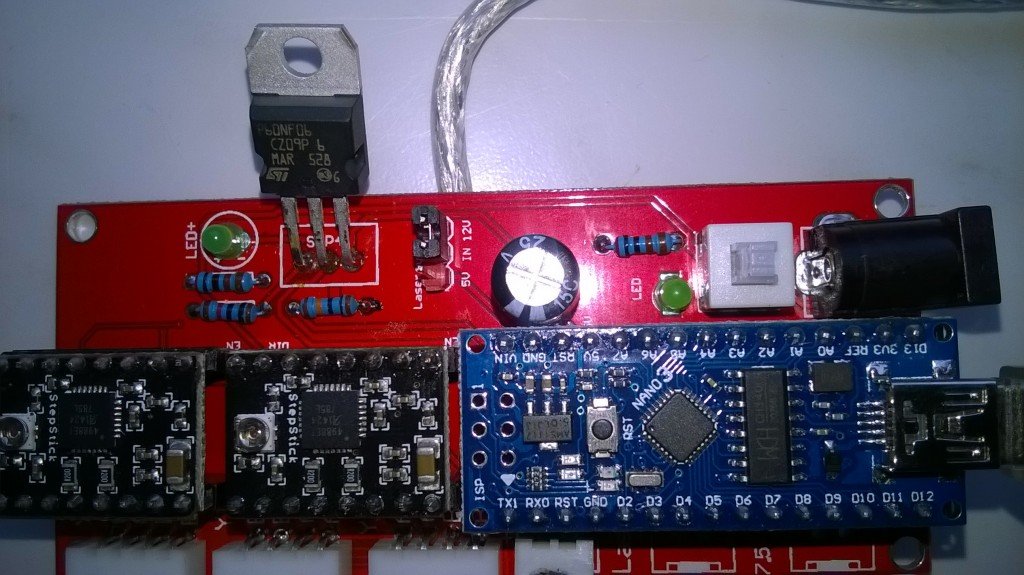
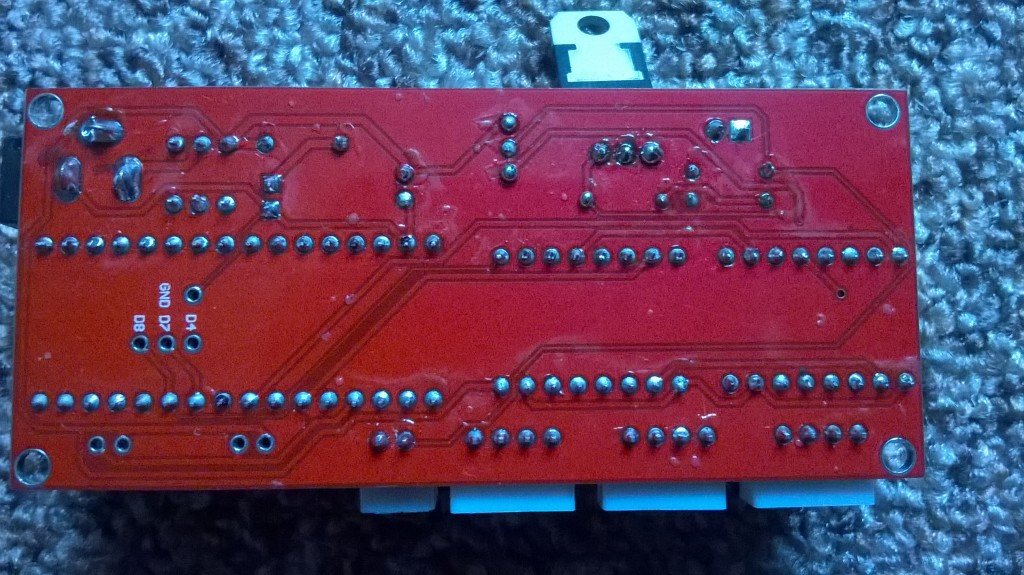
1) Tohle jen tak tipuju podle obrázku ale pokud jsem správně počítal tak na desce je „slot“ pro arduino který má 16 děr, arduino má ale jen 15 pinů (můžeš mít arduino špatně posunuté, zkus ho posunout tak aby byly stejně země… to asi máš :D). Další věc je že na hlavní desce je vyznačený pin D12 jako 3 z prava, pokud bvy si ale srovnal země měl by být na desce označený pin D12 vlastně D11 na arduinu… je možné že se to jen z obrázku zdá ale myslím že jsou tam kapku přehozené piny. Řešení pro tohle by bylo nastavit pin D11 pro laser a né D12.
2) Druhá věc je že jsem si u mosfetu všiml přepínače napětí. Bylo by možná dobré zkusit najít zda máš 5v nebo 12v diodu pro vypalování… Pokud nevíš a nebo víš a máš to nastavené správně, zkusil bych měřit napětí na těhle pinech, možná nám to něco řekne…
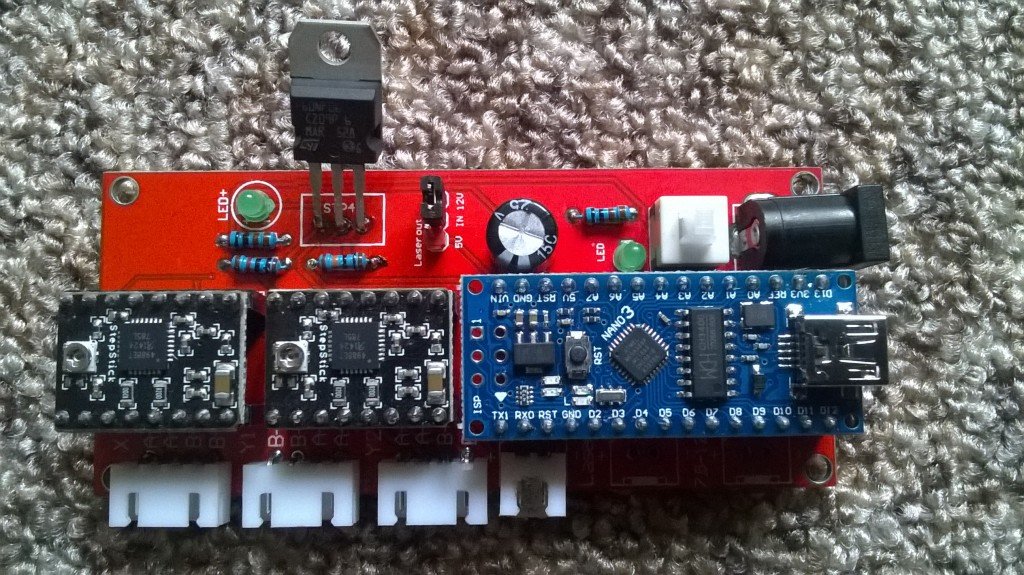
3) Třetí a taky docela možná varianta je že máš divné arduino nebo něco s ním. To co je na obrázcích totiž rozhodně není originální Arduino Nano (alspoň pokud vím). Vypadá spíš jako nějaký čínský klon, proto je možné že není třeba správné mapování pinů. Mohl by si zkusit vyndat arduino, nahrát do něj jednoduchý program na sepnutí pinu D12 a zkusil přeměřit zda je všechno správně.Tohle jsou věci co mě napadly ale je možné že je v tom ještě něco, zkus nějakou z těch věcí (nejpravděpodobnější je asi ta 1.) a pak napiš výsledky 😀 Držím palce.
ÚčastníkZdravím a přidávám slibované foto desky snažil sem se je udělat jak jen nejlépe šlo.
ÚčastníkPrávě já už skoušel kde co věnuji se elektronice už nějaký pátek konkrétně řízení cnc strojů asi 6 let mám mini frézu ta jede na machu a tošibáckem čipu ale toto mně sice nadchlo ale taky naštvalo . Měřil sem vše co je běžné dokonce sem přepájel všechny spoje “ přeci je to jen čajna“ ale na nic sem ztm nepřišel . O automatizaci něco málo vím akorát ta deska jak sem viděl její rozpis výstupů a vstupů tak sem z toho moc moudrý nebyl . Konkrétně výstup a vstup 12 .to mi stačí najít to si proměřím . Kdyžtak můžu hodit prt scr firmwaru převedeného přímo z té desky tam by to mohlo být čitelné protože třeba to může šifrovat ten sw pro ovládání .. aspon myslím . Každopádně pošlu zítra fotky.
mitch
ÚčastníkHmm tak indukce nebo nevím se projevuje i u tohoto zapojení 🙁 tzn, že budu muset asi spínat relátko a tím na krátko spínat vstup do MCU
ÚčastníkPo tom co jsem projel to co si poslal je nám to vlastně k ničemu, oni k tomu dali jen .hex soubor který už je zkompilovaný a nedá se přeložit zpět do „srozumitelného“ jazyka. První věc co bych zkusil je kliknout na „Laser Control,“ (to už si asi zkoušel) pokud se laser nesepne zkusíme ještě něco zítra až pošleš fotku. Kdyžtak budeš měřit 😉
Účastníktak to netuším .testoval sem to avgčkem a nic tam nebylo .
ÚčastníkJen tak mimochodem proč uloz.to píše: Nalezen virus: Win32:Malware-gen 😀
Účastníksw je zde http://uloz.to/xdvNBbJt/benbox-rar heslo pro stažení je ryba fot dám zítra. Nafotím jak bude víc světla . v archívu je firmver i ovládací sw + návod.co se týče desky asi sem to tu psal ale klidně zopakuji jde o arduino nano v3 ta je osazena na druhé desce kde jsou 2 drivery pro krokové motory + pár odporů jeden kondík a mosfet p60nf06.Mně jde v podstatě jen o to jestli to můžiu přeměřit který pin by to měl být a eventuelně někde přepsat abych to přemostil na jiný výstup kdyby ten puvodní byl špatný ale kdyby nic o nic nejde uznali mi reklamaci a poslali mi novou desku.
ÚčastníkAhoj,
nejlepší by bylo poslat jak originální program arduina tak obrázek desky. Pak se s tím dá něco dělat 😉jeru
Účastníknie, aplikacia do androidu este nie je hotova 🙂
ÚčastníkJeště dotaz … Můžu třeba signál z arduina poslat na jiný pin ?
ÚčastníkDobrý den, tu tvorbu grafu z dat ukazuji třeba zde: https://bastlirna.hwkitchen.cz/programovani-webovych-rozhrani-pro-arduino/
Soci
ÚčastníkUpdate: Povedlo se mi uložit data na micro sd kartu, kterou mám na shieldu, nyní bych potřeboval aby na můj web byl z těchto záznamů o teplotách vytvořen graf na mém webu s čím si pořád nevím rady jak udělat. Pochybuju že PHP, HTML, JAVA dokáží vzít soubor, který je na SD kartě ještě k tomu, která je zapojená v arduinu. Víte někdo jak by se to mohlo udělat ? 🙂
Díky za odpověď.Rob
ÚčastníkOmlouvám se, že sem chodím tak všelijak, ale maturita mě dost vycucává a nemám moc čas na jiné věci.
První věc se kterou jsem musel rozhodně pozměnit byl ten offset, protože se snažil vyrovna do šikmé pozice, tak jsem to změnil, aby se snažil být rovný.
Teoreticky, tedy není zas tak nutné se věnovat tomu KP, KI, KD.Jenom letmo jsem pročetl něco o tom bootloaderu a moc nechápu co jsi tím myslel (druhé arduino bych měl).
Skusím si najít čas, abych se podíval na mezní parametry toho akcelerometru.
Tohle je součástka co měří ten náklon
Normální, jednoduché motorky, celkem využívané
Pro napájení arduina využívám 9V baterku, pro napájení těch motorů 4 dobíjecí AA baterky.
Doufám, že jsem ti poskytnul to, co jsi potřeboval. Pokud ne tak napiš a pokusím se to napravit 🙂
ÚčastníkOmlouvám se, že sem chodím tak všelijak, ale maturita mě dost vycucává a nemám moc čas na jiné věci.
První věc se kterou jsem musel rozhodně pozměnit byl ten offset, protože se snažil vyrovna do šikmé pozice, tak jsem to změnil, aby se snažil být rovný.
Teoreticky, tedy není zas tak nutné se věnovat tomu KP, KI, KD.Jenom letmo jsem pročetl něco o tom bootloaderu a moc nechápu co jsi tím myslel (druhé arduino bych měl).
Skusím si najít čas, abych se podíval na mezní parametry toho akcelerometru.
Tohle je součástka co měří ten náklon
Normální, jednoduché motorky, celkem využívané
Pro napájení arduina využívám 9V baterku, pro napájení těch motorů 4 AA baterky.
Doufám, že jsem ti poskytnul to, co jsi potřeboval. Pokud ne tak napiš a pokusím se to napravit 🙂
dehtak
Účastníknarazil jsem na atmel studio , myslim ze je to docela dobrej ide na psani tech knihoven, ma to i debuger , je to na basi visual studia .
ArduXPP
ÚčastníkJestli někdo bydlí v Praze , tak ok. Ale jestli to jde udělat i v určitém městě, tak pak to je plus. Ale jinak když zádilka bude pod 22EUR a celníci budou chtít zkontrolovat správnost ceny balíku, tak pak když mi to neumožní celnice v mém městě, tak budu platit poště 99Kč za zastupování . Nejde mi o nizké ceny, ale když toho nakoupím víc, tak je to pak výhodnější v zahraničí.
Účastníkdámy a pánové. řešíte tady krásné úvahy ale znovu vymýšlíte kolo.
Pokud chcete nakupova levně a občas mít problém, holt musíte jít cestou, že některé udaje jako telefon a mail budete muset zdělit a když vám celnice něco zabaví tak sí holt změníte plán dne a jdete řešeit celnici.
Druhá varianta : nakupujte v ČR. Ono totiž pořekadlo, že „čas jsou peníze“ není jenom tak.ÚčastníkKdyž bude balík na celnici zastaven ke kontrole, tak se poště platí 99Kč + se musí podepsat plná moc. To už není tak výhodné, a je tam riziko, že zásilka nepříjde.
Máte u paypal datum narození vymyšlený nebo pravdivý ?
Jak vysvětlíte prodejci, že jste zásilku nepřevzali protože by jste museli platit poplatek 99Kč. Bude to prodejcem uznané ?
Účastníkod 10 kč do 300 kč. Více kusů nevím. Když jsem objednával DS1307 tak to byla aukce 5ks v jednom „balíčku“ a tak mi přišel jeden balíček o 5 ks. Jindy jsem objednal folii na telefon a vzal jsem 2 ks a přišli mi 2 balíčky.
Takže asi tak … -
AutorPříspěvky