
posjirka
Vytvořené odpovědi
-
AutorPříspěvky
-
Chucky77
ÚčastníkTak to jsem také řešil a zatím jsem koupil kolečka z Lega. Při koupi na váhu (v Praze na Plzeňské) vyšlo jedno kolečko na asi 12 Kč. A to jde. Akorát na ty krokáče to bude chtít úpravy.
Pro začátečnickou nezkušenost jsem od krokačů ustoupil. A na stejnosměrný klasiky po dopilovani hřídele pasujou.Ondřej
Odesláno z mého Lenovo P70-A pomocí Tapatalk
rades
ÚčastníkAno, funguje, ale stál mi jakákoliv klávesa píše 0 :/
Zbyšek Voda
ÚčastníkPojďme tedy pokračovat dál 🙂 Koukám na dokumentaci, tak snad ji dobře chápu. (http://playground.arduino.cc/Code/Keypad)
Prozkoumejme pořádně funkci keypadEvent.
void keypadEvent(KeypadEvent eKey){ for (int i =0; i = 5; i++){ admpw[i] = keypad.getState(); Serial.println(admpw[i]); } }Ta je zavolána kdykoliv, když dojde ke změně stavu klávesy (uvolnění, stisknutí).
Funkce getState() vrací hodnotu podle toho, co se s keypadem děje – vrací hodnoty
IDLE, PRESSED, RELEASED a HOLD. Vy tedy budete ve funkci keypadEvent testovat, jestli je getState() rovna PRESSED a poté zapisovat hodnotu stisknuté klávesy do pole admpw[] na patřičné místo (další v pořadí).Takže bych postupoval následovně: vytvořte si na začátku programu proměnnou
int pos = 0;, která bude udávat pozici načteného znaku. Při stisknutí tlačítka dojde k uložení stisknutého tlačítka do pole admpw na index pos a navýšení proměnné pos o 1. Musíte si také pohlídat, aby pos měla hodnoty 0 – 4. To se dá zařídit operátorem modulo – %.void keypadEvent(KeypadEvent eKey){ if(keyboard.getState == PRESSED){ admpw[pos] = keyboard.getKey(); pos = (pos + 1) % 5; } }Takhle by to podle mě mohlo jít 🙂
ÚčastníkTedy, jak zařídit, aby program čekal na stisknutí klávesy a přečetl tak pětimístné heslo?
ÚčastníkKaždopádně stisk jakékoliv klávesy mi nyní vypíše
1
1
1
1
1
3
3
3
3
3
0
0
0
0
0
=> Opět jsem bezradnýÚčastníkJežiši Kriste! Já jsem fakt debil…
ÚčastníkDobrý den, ve funkci keypadEvent máte podivnou ukončovací podmínku cyklu for.
Máte tam:for (int i =0; i = 5; i++)
Tedy cyklus probíhá, dokudi = 5. V každém průchodu se tedy do i přiřadí hodnota 5, je vyhodnocena jako true a cyklus opakuje znova – tedy se zacyklí.Asi je to překlep a chtěl jste napsat
i < 5🙂Pokud byste chtěl testovat rovnost, tak musíte použít operátor
==,=je přiřazení hodnoty do proměnné.posjirka
Účastníkpárkrát jsem něco takového zvažoval a vždy se objevilo něco závažnějšího. jinak klasické časomíry fungují, takže to není neřešitelné. Proč je tam ten bezdrátový přenos?
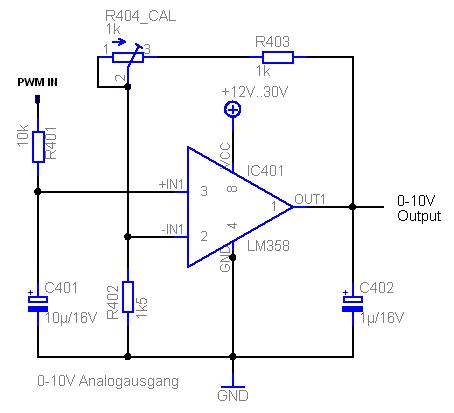
Účastníkjá byhc zkusil toto:
http://www.mikrocontroller.net/attachment/10061/pwm_to_analog.jpg
zkoušel jsem to simulovat a strašně dlouho se to přepočítává = nemám na to čas.
Uvidíme jak budu stíhat v pátek a kdyžtak bych to vyzkoušel naživo …krcmar.tomas@gmail.com
ÚčastníkBlinP, diky vypada to dobre
jeste jsem behem patrani narazil na toto, mam pocit ze to dokonce i chapu, neslo by to pouzit ?
https://www.youtube.com/watch?v=U8G13SpPDfgfinke_tomas
ÚčastníkDobrý den. Děkuji za Vaší odpověď vážim si toho. Vy máte s něčím takovým už zkušenosti? S pozdravem Finke.
ÚčastníkTo Aleš :
Díky, Nejsem z Prahy, ale Kousek, Struhařov u Mnichovic, zatim jezdím nakupovat do gm
To posjirka:
Takže to nemám zkoušet stavět, co byste teda doporučil za obvod na ovládání té klapky?
Díky
Účastníknavíc simulace je pouze orientační. Jde to poznat třeba při simulaci multivybrátoru se 2 tranzisotry. Po sepnutí napětí se nerozjede, protože mají oba dva absolutně stejné zesílení, takže se žádný nespustí dřív.
RC čeln jako převodník PWM na analogovou honotu samozřejmě funguje. Jen když si představíte charakteristiku trnazistoru, který při cca 0,7V začne otevýrat a při cca 1,2V je naplno otevřeny, tak tam není moc prostoru pro regulaci v pásmu 0-5V, kterí by se na RC členu nastřádali.
Oldast
ÚčastníkDobrý večer
na seriovém portu to funguje normálně tak jak má,ale displej ukazuje jen hodnoty od 0 nahoru.A zkusím změnit proměnou.Dík.Účastníkchlapci nechci vám do toho kecat, ale to co tu ted řešíte nemá nic společného s převodem PWM na analogové napětí. Dejte si do toho zapojení osiloskop a uvidíte co tím myslím. Ten tranzistor je zapojený jako spínač. To znamená, že podle vstupního signálu přizemńuje zátěž. Kondenzátor nemá v podstatě žádný vliv, protože v tomto zapojení není jeho charekteristika lineární a přechází ze stavu rozpojeno do saturace.
Voltmetr měří střední napětí, proto se vám zdá, že to hezky reguluje.
Kdyby zátěž byla v emitoru tranzistoru tak by to možná šlo. V tu chvíli by totiž tranzistor fungoval jako proudový zesilovač a oddělil by RC člen od zátěže … můžete se podívat tu:https://circuits.io/circuits/2285260-pwm-to-analog-nefunkcni
Aleš
ÚčastníkJe to úplně jedno. V tomto zapojení nemá zesilovací činitel žádný vliv. Vy jste z Prahy?
Účastníkdiky moc,
ktery ma pouzit, staci ta 10 lisi se to jenom proudový zesilovací činitel
https://www.gme.cz/bipolarni-tranzistor-bd139-10-to126
https://www.gme.cz/bipolarni-tranzistor-bd139-16-to126dikec
Vojtěch Vosáhlo
ÚčastníkDobrý večer,
problém bude nejspíše v tom že máte proměnou teplota inicializovanou jako byte. Vámi použitá knihovna s byty asi neumí pracovat. Zkuste jí změnit na float místo byte. Možná my to nedocvaklo ale nejde vám to vypsat na displeji nebo sériový port a nebo nefunguje ani jedno?ÚčastníkTranzistor jsem použil první, který mi přišel pod ruku. Nějaká 2SC2222, ale dá se použít jakýkoliv NPN tranzistor s minimálním napětím 12V. V původním schématu je BD139, což je tranzistor s trochu větším vykonem. Odpor 1k do báze, a kondenzátor 1uF/35V
ÚčastníkTo je pt100, já mám pt1000 přímo k tomu krbu, plamen svíčky to dalo v pohodě
Mohl bych poprosit o přesnější popis součástek v tom funkčním generátoru napětí zkusím to taky postavit v reálu
Díky moc
TH
ÚčastníkDo jaké teploty to měří? V tom návodu píšou do 370″C. Není to málo?
Účastníktak se musim pochlubit
uchodil jsem prvni cast projektu
teplomer s cidlem pt1000pomoci navodu
http://navody.arduino-shop.cz/arduino-projekty/mereni-teploty-pomoci-pt100.htmljsem v gme zakoupil soucastky (prodavac se me pta mate multimetr nebo vam ty odpory mam popsat, delal jsem machra a doma pak res mobil zvetsoval a pomoci google lustil barevny carky :)) )
postavil a ono to FUNGUJE !!!!
teda jeste to nemam zkalibrovane, ale lezou z toho hodnoty odpovidajici relaite
ledova voda, varici voda, plamen svicky 🙂jen tak dale 🙂
Attachments:
Účastníkto vojtech:
v pohode, nekritzuju, nenapomínám a i já občas ujedu. jsem jen lidi 🙂Účastníkvojtechu ty zkratky nejsou moc dobre. 1w a uC bych taky lustil ? prosim zkuste se drzet zazite terminologie 1-wire pripadne one-wire a uprocesor.
Za ty zkratky se omlouvám 😀 nalezlo mi toho nějak moc do hlavy.
Účastníkogledne mereni teploty: je treba dat cidla do urovne 80-120cm na stenu kam nesviti moc slunce a ani neni topeni. voli se vetsinou nejstudenejsi stena.
jako zaklad pro zkousku souhlasim s volbou arduino mega , dotykovy lcd, cidla releovy modul. cidla dallas jsou takovy zvlastni a v pripade nevhodneho naprogramovani mohou zbytecne zdrzovat funkci celeho programu.je treba postupovat v klidu a logicky. pro start je to moc dobry projekt a volba dotykoveho lcd ti pomuze z omezeneho reseni pres 2×16 lcd a tim padem i horsi nastaveni. mem doma taky dotykovy lcd a ma nekde spatny spoj a 5 radku mi vynechava. …Účastníkvojtechu ty zkratky nejsou moc dobre. 1w a uC bych taky lustil ? prosim zkuste se drzet zazite terminologie 1-wire pripadne one-wire a uprocesor. spis to pisu pro cady budouci kdy pak lidi toto forum budou potrebovat pro svoje reseni a budou se blbe orientovat.
jinak k prohektu. zvolil bych spis reseni komunikace pres rs485 nebo pres wifi. souhlasim s dislokovanou jednotkou pro kazdou mistnost.
kszdopadne bude treba silove napajeni pocitam ze tak 5v/1 A minimalne. lepsi by bylo 12V a kazda stanice by mela vlastni spinany zdroj. urcite bude nekdy treba vyssi napeti. ohledne attiny: zjistil jsem ze nez pouzivat omezene attiny tak za podobne penize se da koupit v arduino mini. ted jsem pouzil c twplomeru taky attiby jen kvuli mistu v krabici.
1-wire: i arduino muze byt jako 1-wire slave zarizeni. jsou na to knihovny. pri delsich vzdalenostech bude klesat pull up odpor az na 1k a nejsem si jisty spolehlivostiÚčastníkto musíš vědět ty. jestli tam ten signál je nebo neni …
hcdady
ÚčastníkDobrý den, děkuji za tip. Mám objednáno a uvidíme :-). David
ÚčastníkDobrý den, já mám dobrou zkušenost s tímto převodníkem http://www.hwkitchen.com/products/logic-level-converter/. Použil jsem ho v několika projektech a funguje bez problému.
-
AutorPříspěvky

{kind=link}