
Podmořský robot poháněný ploutví na bázi Arduina

Prototyp robota plovoucího pod vodou, který je vybavený dvěma ploutvemi po stranách, vyvinula laboratoř Kontrolních systémů a robotiky v Technologickém institutu na Krétě v Heraklionu (Řecko). Podmořský robot je ovládaný pomocí Arduino Mega:
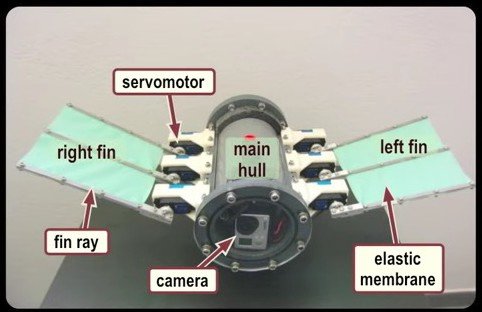
Každá ploutev se skládá ze čtyř individuálně poháněných paprsků ploutve, které jsou propojené elastickou membránou. Palubní počítač generuje strukturu pohybů, která způsobuje vlnivý pohyb ploutví, díky kterému se robot pohybuje. Prototyp, který je plně nevázaný a energeticky samostatný, zároveň obsahuje IMU/AHRS jednotku pro navigaci, bezdrátový komunikační modul a palubní videokameru. Video zachycuje záběry z experimentů provedených v laboratorní testovací nádrži, ty měli za cíl prozkoumat možnosti ovládání pohybu v uzavřených kruzích, a zároveň záběry zachycené během podmořských testů.
Na Arduinu běží speciálně vyvinutý real-time firmware, který obsahuje CPG (Central Pattern Generator), generující pohyb robotických ploutví. Robot obsahuje 7.4V lipo baterii, která zároveň napájí i Bluetooth modul pro bezdrátovou komunikaci a video kameru, která během různých úkolů nahrává video.
Přeloženo z https://blog.arduino.cc/2015/11/25/fin-propelled-underwater-robot-prototype/.
Přeloženo z https://blog.arduino.cc/2015/11/25/fin-propelled-underwater-robot-prototype/ a mírně upraveno.

fanoušek Open Source
One Comment on “Podmořský robot poháněný ploutví na bázi Arduina”
Napsat komentář
Pro přidávání komentářů se musíte nejdříve přihlásit.
hefi
7.12.2015 at 18:56Co dělají vědci v laboratořích, už dávno zvládli modeláři ve své garáži 😀 . Ne, trochu to zlehčuji. Mrkněte na „Projekt žralok“. Pořad Die modellbauer se zabývá spíš technickými stránkami modelů, elektronikou nebo jejich programováním skoro vůbec, stejně moc zajímavé.
Pozor Němčina. Přeložil bych nejpodstatnější větu: „Díky mikroprocesoru, co Norbert naprogramoval, jsou rybí pohyby hodně věrohodné.“ Typ není zmiňován.
https://www.youtube.com/watch?v=pfIUMiFVZDc