christinesharkey
Vytvořené odpovědi
-
AutorPříspěvky
-
jodynek
ÚčastníkJo, tak téhle „vyfikundace“ už jsem si všimnul 🙂 Celkem mě to napoprvé zarazilo 🙂
Zbyšek Voda
ÚčastníkDobrý den, můžete sem prosím nasdílet váš program? Děkuji
Matěj Suchánek
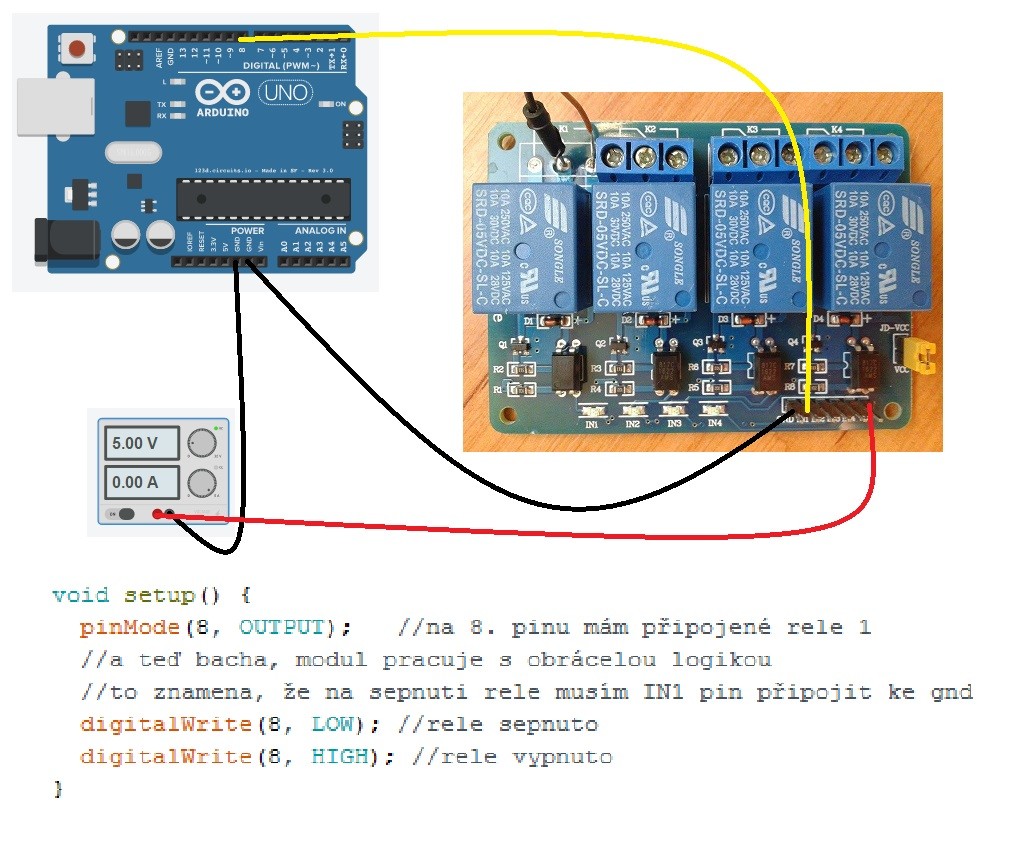
ÚčastníkA ještě bacha na to, že modul pracuje s obrácenou logikou 😉
Attachments:
ÚčastníkVčera jsem to vyzkoušel a opravdu to funguje.
Takže resumé: stačí propojit GND arduina s GND napájecího adaptéru pro relé shield.Děkuji Vám za dobrou radu.
Lorant
ÚčastníkJa som Library nahral pre 9225,lenže do arduina ver. 1.0.5, nechcel som novšiu, lebo som na dovolenke a môj tablet, switch má dosť málo miesta. Ale asi to bude problém. Zajtra skúsim 1.6.3. Ináč vďaka za ochotu, zajtra sa ozvem, keď sa vrátim z plavby…
ArduXPP
ÚčastníkJeště dodám, že driver se určuje dle typu LCD, když bude na přední straně displeje třeba nápis LCD-2000-9225 , tak sample code + potřební driver je na Library for Arduino-Update with Arduino IDE 1.6.3\LCD_2000_9225 , kod se nejprve nahraje do složky libraries , tam se nahraje složka LCD_2000_9225 a pak se ze složky veme examples – třeba TFTDisplayText_Mega2560 a to se zkopíruje do arduino ide a nahraje do arduino mega.
ÚčastníkPodle toho odkazu jste měl dostat toto:
We provided development kit include:1, All chip’s datasheet
2, Arduino driver and sample code
3, Application notes for Arduino UNO and Arduino Mega2560
4, Source code for STM32
5, Schematic
Hned 4 je driver a určitě se najde i sample code .
Na stránce inhaos jsem našel PDF kde je jak zapojení tak i ukázka kodu pro mega – Jedná se o tento PDF http://www.inhaos.com/downcount.php?download_id=133 , víc k tomu není potřeba, je tam vše.
ÚčastníkTak jak jsem to psal, mě to funguje. Já jsem třeba nemohl nahrát do chipu právě žádný kod, dokud jsem tam nedal tlačítko, ale to nebylo automatické. Tak jsem použil keramický kondenzátor a ten nahradil tlačítko. U arduino uno není tlačítko potřeba, to tlačítko nebo pro automatický je keramický kondenzátor, je jen pro usb převodník.
Nebo mám poslat schéma jak mě to funguje ?
ÚčastníkDěkuji za odpovědi, pokusím se to dnes vyzkoušet a dám vědět.
Vojtěch Vosáhlo
ÚčastníkJo, to je dost možné. Nenašel jsem mocinformací takže jsem spíš tipoval…
darira
ÚčastníkZapoj na VCC externí zdroj +5V. Na GND připoj GND externího zdroje a Arduina. Stejný modul akorát 8x a 2x jsem takto používal a nebyl problém. Kvůli hluku a rychlosti spínání doporučuji spíše SSR relé. Jumper je pro optické oddělení vstupu, pokud se nepletu. Něco o tom se dá přečíst na této stránce.
ÚčastníkKdybyste pole naplnil pomocí cyklu, místo memset, jak to dopadne?
ÚčastníkDobrý den,
moc dokumentace u toho není ale zkuste odstranit ten jumper a pak to napájet externě.schamann
Účastník‚0‘ jsem tam mel uplne na zacatku, bylo to uplne stejne… podle dostupnych informaci tam muze byt to pole naplnene uplne libovolnym znakem. Prazdna hodnota mi vyhovuje protoze nevim presne kolik znaku mi prijde z modemu jako odpoved na AT. Navic jsem to presne takhle videl ve vice projektech, ktere se komunikaci s AT prikazy zabyvaji a je to v te konstrukci uplne bezne.
posjirka
Účastníkobávám se, že to bude tím /0 … Arduino potřebuje mít zadanou hodnotu. Empty je pro něj hazardní. Zkus mu dát hodnotu 0 nebo „“… Jestli budu mít zítra čas podívam se na to a vyzkouším to na UNO.
ÚčastníkCo není jasne ? Pole je prázdné… a kdyby v něm něco bylo tak ho pomocí memset smazu.Jde čistě jen o to že memset mi změní obsah jiné promenne se kterou nijak nesouvisí. Tak patram po duvodu. Ty poznámky vsetluji co se děje, nikoli co chci aby se dělo. Co chci je jasne z kódu.
Účastníksice mám IQ 156, ale z tvého popisu opravdu nejsem moudrý 🙂
Není jasné co vlastně zapisuješ za pole, resp jaké hodnoty/typy hodnot tam vkládáš.
to pole musí být 1 typu proměnných. pokud tam vkládáš unsig long a char tak ti to nepůjde, resp bude ti to vyhazovat blbosti.
Buď vše převe´d na max. možný typ proměnné, nebo holt musíš pracovat s pamětí po jednotlivých byte.ÚčastníkJak jsem již psal, tahle chyba je normální, pojistka se zapíše jen se nepřečte zpět ve správném tvaru… USBasp vám asi na ser. komunikaci stejně nepomůže 😉
kamil
ÚčastníkJe to jednoduché. Máš na výběr z mnoha variant. Tu nejjednodušší vidím v tom, že bych roletu ukotvil po stranách do kolejnic – dělají se buď přímo na rolety nebo bych si zbastlil hliníkovou. Jednak tím vyřešíš možnost usadit roletu a k ní koncáky a druhak se zbavíš nepříjemného „poletování“ rolety ve větru.
Pokud se Ti do toho nechce, je jednoduchý udělat optickou závoru. Řešil jsem teď pojízdné dveře a závoru dělal z laseru a kosmetického „make-up“ zrcátka a foto-rezistor na příjem… Tím si eliminuješ polet rolety, protože ten laser bude uprostřed.
Nicméně bych to stejně kombinoval s tím tvým enkodérem. Zkrátka laser nechat až jako záchytný bod, resp. takovou pojistku pro případ, že ten enkodér „kecá“ a roletu a její pozici určovat na základě enkodéru. Jediné co musíš udělat je „homing“ na začátku, tzn. kalibraci. Normálně si resetni enkodér na 0, sjeď s roletou dolů a ulož si pozici enkodéru jakmile sepne laser. Potom už stačí průběžně tu kalibraci opakovat pokaždé při požadavku na úplné stažení rolety.
bot
ÚčastníkNo asi počkám až mi přijde progrramátor USBasp. Zkusil jsem vymazat čip, vše proběhne asi v pořádku, ale nejde přepsat pojitsku E – při vymazání se nastaví na 0x07.
Převodník jsem zapojoval s rezistorem včetně kondíku, ale pořád to nechce komunikovat (asi tam ten bootlaoder nebude 🙁 ).
Zatím děkuji za všechny vaše návody a rady.
lubosm
ÚčastníkPokiaľ sa týka koncových bodov, tak čo tak použiť magnetické kontakty.
je to jednoduché riešenie a tým že sú zapúzdrené tak aj odolné voči poveternostným vplyvom.
Dokonca sa dá použiť len jeden prepínací – používa sa napr. na pohonoch posuvných brán.Aleš
ÚčastníkTady máš potom návod, jak se to kalibruje 🙂
ÚčastníkLepší je koupit tohle:
http://www.hadex.cz/t114-anemometr-k-meteostanicim-wh1080-a-wh1090/
Program je potom už dost jednoduchý 🙂keksik334
ÚčastníkÚčastníkNeni vůbec za co. Je hezký že se tu alespoň jednou za měsíc někdo objeví a já můžu pomoct. Je to jako takovej vedlejší projekt ?
Hodně štěstí do budoucnaÚčastníkdneska uz to nedam 😀 chtel jsem zkusit ten Vas posledni kod ale ne to nedam dneska dodelam to takhle dam tam 7805 a az bude chut pustim se do toho znova 🙂 kazdopadne Vam parti velke diky za vas cas a pomoc DEkUJI
ÚčastníkMyslim že by měla, můžete to kdykoliv vyměnit když to odejde a dát tam něco lepšího…
Až na to bude zas síla tak to můžete vylepšit.Účastníktak bude problem v tom delici
jelikou uz jsem docela unavenej sedim tady na zemi tak jsem vzal 7805 napojil na blinkt a svete div se arduino se sepne animace bezi.. vydrzi to ta 7805 kdyz ji bude takhle neustale zapinat? ze bych tu udelal i na druhou stranu
Účastníktak připojte oba děliče na A0 a A1 a nahrajte tento kód. Musíte si ještě dovyplnit nějaké definice. Vstup z levého blinkru jsem dal na A0, z pravého na A1.
#include <Adafruit_NeoPixel.h> ////// NASTAVENI LEVEHO PASKU #define PIN_L_PASEK pin l pasku #define NUM_LEDS_L_PASEK pocet led l pasku Adafruit_NeoPixel l_pasek = Adafruit_NeoPixel(NUM_LEDS_L, PIN_L_PASEK, NEO_GRB + NEO_KHZ800); ////// NASTAVENI PRAVEHO PASKU #define PIN_P_PASEK pin p pasku #define NUM_LEDS_P_PASEK pocet led p pasku Adafruit_NeoPixel p_pasek = Adafruit_NeoPixel(NUM_LEDS_P, PIN_P_PASEK, NEO_GRB + NEO_KHZ800); ////////////POCET LED JEDNOHO Z PASKU #define NUM_LEDS NUM_LEDS_L_PASEK ////// NASTAVENI VSTUPNICH PINU #define L_BLINKR_PIN A0 #define P_BLINKR_PIN A1 void setup() { /// Nastaveni pinu na ktere pujdou vstupy/ blinkry pinMode(L_BLINKR_PIN, INPUT); pinMode(R_BLINKR_PIN, INPUT); ///Nastaveni pasku l_pasek.begin(); l_pasek.show(); p_pasek.begin(); p_pasek.show(); } void loop() { if(analogRead(P_BLINKR_PIN) > 500 && analogRead(L_BLINKR_PIN) < 500) { colorWipe(0xff,0xa2,0x00, 40, 1); colorWipe(0x00,0x00,0x00, 5, 1); } if(analogRead(L_BLINKR_PIN) > 500 && analogRead(P_BLINKR_PIN) < 500) { colorWipe(0xff,0xa2,0x00, 40, 0); colorWipe(0x00,0x00,0x00, 5, 0); } if(analogRead(L_BLINKR_PIN) > 500 && analogRead(P_BLINKR_PIN) > 500) { colorWipe(0xff,0xa2,0x00, 40, 2); colorWipe(0x00,0x00,0x00, 5, 2); } } void colorWipe(byte red, byte green, byte blue, int SpeedDelay, int pasek) { if(pasek == 0){ for(uint16_t i=0; i<NUM_LEDS_L_PASEK; i++) { setPixelL_PASEK(i, red, green, blue); showL_PASEK(); delay(SpeedDelay); } } if(pasek == 1){ for(uint16_t i=0; i<NUM_LEDS_P_PASEK; i++) { setPixelP_PASEK(i, red, green, blue); showP_PASEK(); delay(SpeedDelay); } } if(pasek == 2){ for(uint16_t i=0; i<NUM_LEDS; i++) { setPixelL_PASEK(i, red, green, blue); setPixelP_PASEK(i, red, green, blue); showL_PASEK(); showP_PASEK(); delay(SpeedDelay); } } } void showL_PASEK() { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel l_pasek.show(); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED FastLED.show(); #endif } void setPixel_L_PASEK(int Pixel, byte red, byte green, byte blue) { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel l_pasek.setPixelColor(Pixel, l_pasek.Color(red, green, blue)); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED leds[Pixel].r = red; leds[Pixel].g = green; leds[Pixel].b = blue; #endif } void showP_PASEK() { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel p_pasek.show(); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED p_pasek.show(); #endif } void setPixel_P_PASEK(int Pixel, byte red, byte green, byte blue) { #ifdef ADAFRUIT_NEOPIXEL_H // NeoPixel p_pasek.setPixelColor(Pixel, p_pasek.Color(red, green, blue)); #endif #ifndef ADAFRUIT_NEOPIXEL_H // FastLED leds[Pixel].r = red; leds[Pixel].g = green; leds[Pixel].b = blue; #endif } -
AutorPříspěvky