
Arduino robot RedBot #2: Sestavení
V minulém článku jsme si ve stručnosti představili, co je to Arduino robot RedBot. Dnešní článek je vlastně návod, jak tohoto robota sestavit do použitelné podoby. Sestavíme si všechny jednotlivé části a postupně je připevníme k hlavním mechanickým deskám. Stavebnice robota může být inspirací pro vaše další Arduino projekty.
Pozor! Používejte minimum násilí. Mohlo by dojít k mechanickému poškození částí. Sestavení robota občas vyžaduje například více zatlačit, ale buďte opatrní. Nedoporučujeme používat žádné nářadí (kleště…) kromě přiloženého šroubováku.
Součásti robota
Níže vidíte všechny součásti Inventor’s Kitu popsané písmeny.

Hallovy sondy
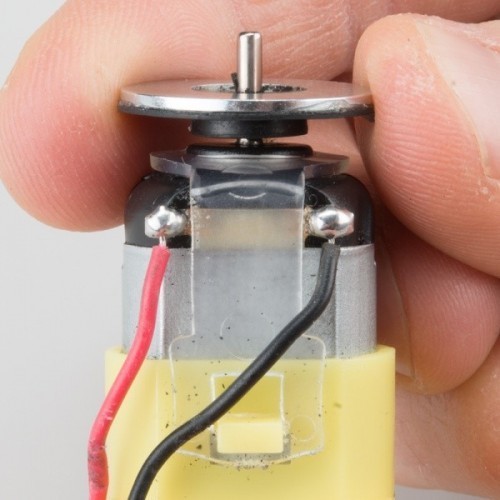
Hallovy sody detekují pomocí magnetů otáčky motorů. Musí být tedy umístěny blízko nim. Nejdříve si navlékneme magnety (2x N) na osy motorků.
Z jedné z hlavních mechanických desek vyloupněte menší destičky (2x F) obdélníkového tvaru a provlékněte jí Hallovu sondu.

To stejné proveďte s druhou sondou, ale zrcadlově.

Oba moduly nyní umístěte podle obrázku do desky, ze které jste vyloupli destičky pro sondy (A).

Hallovy sondy máme umístěné, zbývá k nim přidat motory.
Motory a kola
Budeme potřebovat kola (2x L), motory (2x K), a úchyty motorů (2x D, 2x C). Začneme tím, že na motory navlékneme středový úchyt (D). Pozor! Není to tak jednoduché. Začneme tím, že ve navlečeme úchyt na motor ze strany, kde je magnet. Měli bychom ho mít v poloze, jakou vidíte na obrázku. Pozor, aby se vodiče nezapletly někam jinam. Mohlo by dojít k jejich poškození.
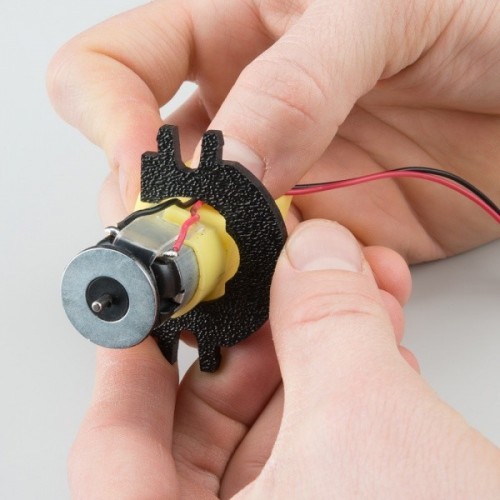
Přidržujte vodiče na místě a opatrně otočte úchytem do polohy na obrázku níže.

Poté připevněte zadní úchyt (C). To stejné proveďte s druhým motorem.

Motory přidělejte ke spodní desce (A).
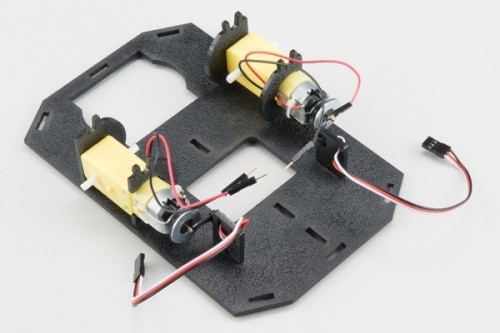
Nakonec nasuňte kola na bílé plastové osy motorů.

Senzory sledující čáru
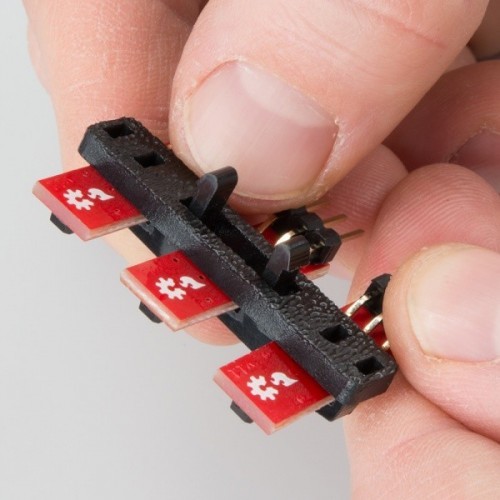
Nyní budeme potřebovat senzory na sledování čáry (3x Q), vodiče (3x Y) a úchyty senzorů (I, J).
Začneme tím, že senzory umístíme do úchytu I.

Zajistíme je úchytem J.
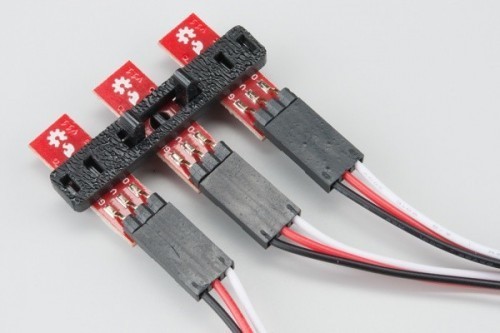
Připojíme vodiče tak, aby bylo zapojení odpovídající tabulce:
| Barva vodiče | Pin senzoru |
| černá | GND |
| červená | VCC |
| bílá | OUT |
Nakonec umístíme senzory zespodu hlavní hlavní desky.

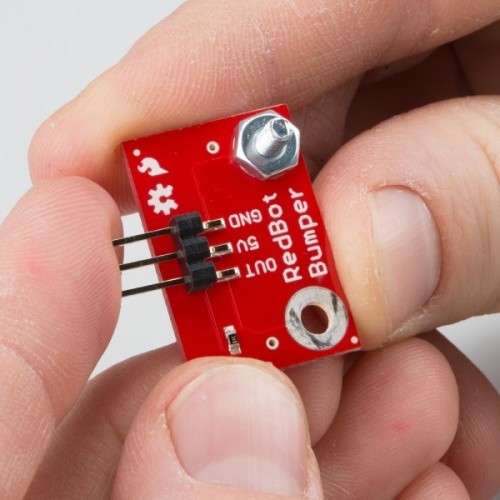
Nárazníky
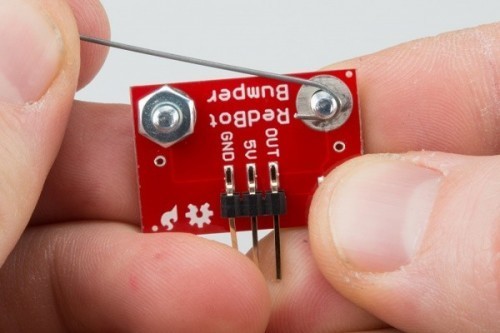
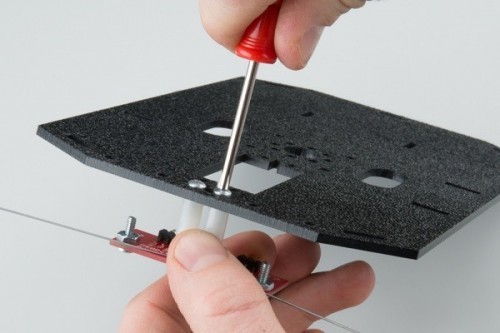
Budeme potřebovat horní desku (B), modul nárazníku (2x T), drát (2x U), šroub (6x V), rozpěra (2x W), matka (2x X), vodiče (2x Y), šroubovák. Budeme potřebovat křížový šroubovák. Dodávaný šroubovák je oboustranný. Pokud je zrovna viditelná část s plochou hlavou, vytáhněte stříbrnou osu a otočte ji. Nyní bude venku křížová hlava. Začneme tím, že na modul nárazníku přišroubujeme šroubek a matku.
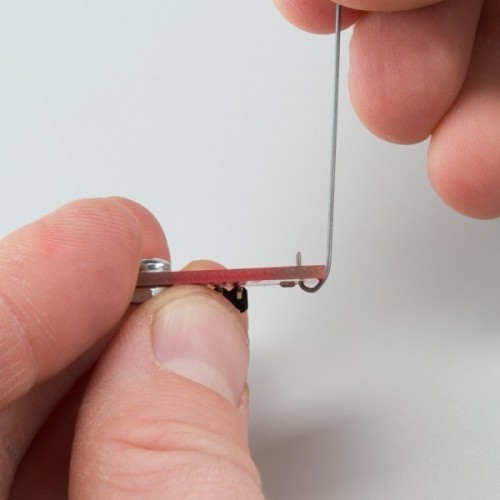
Nyní musíme ohnout drátek, který bude sloužit jako nárazník. Pokud nemáme po ruce kleště, můžeme použít samotný elektrický modul nárazníku. Prostrčte drát malou dírkou v nárazníku tak, aby kousek koukal ven. Ale hlavně – pozor na oči, drát může být ostrý!
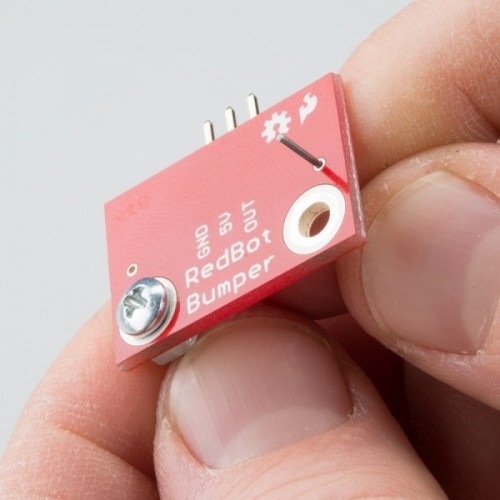
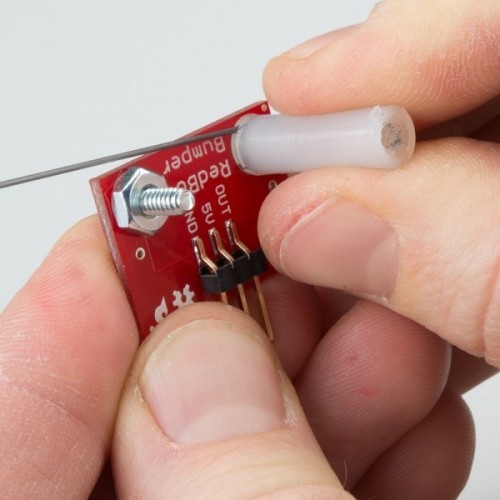
Připevněte drátek k elektrickému modulu pomocí šroubu a umělohmotné rozpěry.
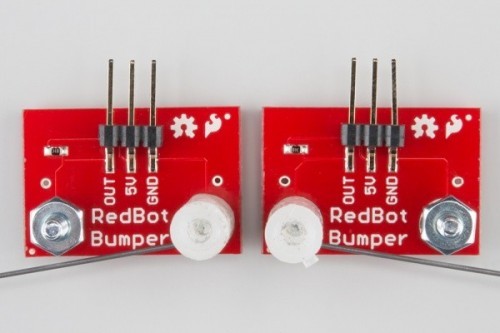
To stejné proveďte s druhým modulem, ale zrcadlově.
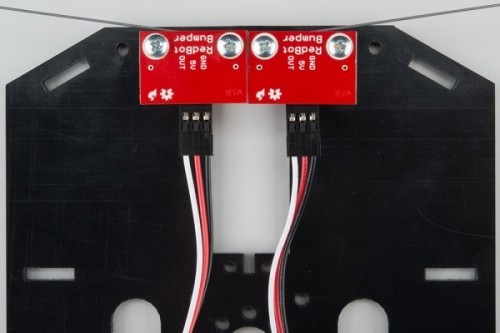
Dále moduly přišroubujeme do obdélníkové dírky na přední straně horní desky.
Vodiče připojíme stejně, jako jsme je připojili u senzorů pro sledování čáry.
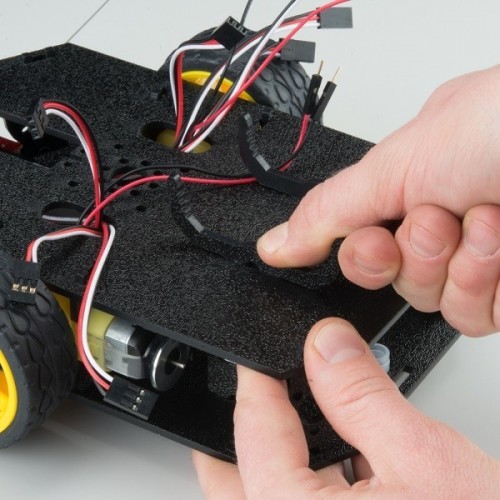
Spojení horní a dolní desky
Budeme potřebovat kluznou část (M) – ta tvoří třetí opěrný bod robota – a spojovací díly (4x E). Začneme tím, že přiděláme kluznou část na spodní desku.
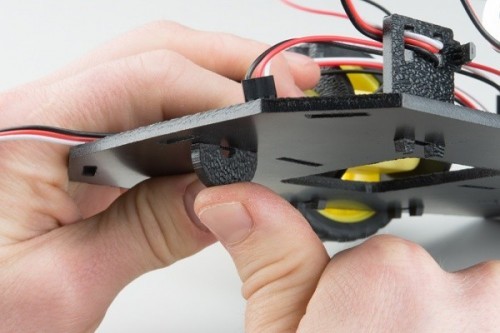
Dále připojíme spojovací části do všech rohů spodní desky.

Než připojíme horní desku, musíme si protáhnou vodiče odpovídajícími dírami. Levé vodiče povedeme levými dírami, pravé pravými. Strana vedení vodiče středního senzoru pro sledování čáry je na nás. Poté můžeme obě desky spojit.
Hlavní deska
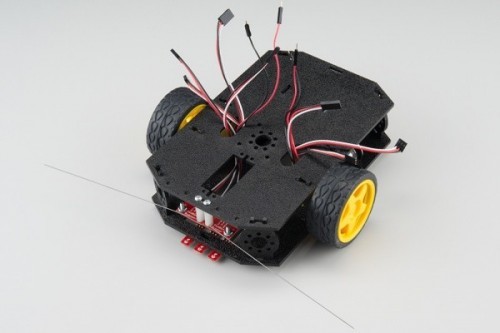
Budeme potřebovat hlavní desku (P) a úchyt (2x G). Začneme tím, že připevníme úchyty na horní desku.
Do úchytů připevníme hlavní desku.
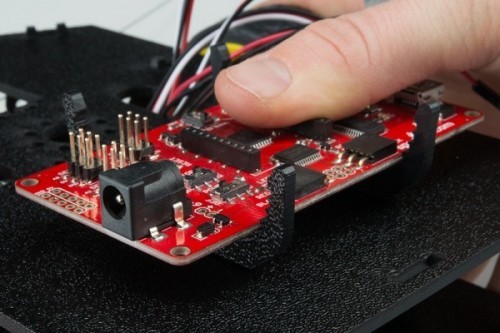
Nyní nás čeká poměrně obtížný úkol, a to vše správně zapojit. Pomůžou nám k tomu následující tabulky:
Levý Senzor pro sledování čáry
| Hlavní deska | Vodič | Senzor |
|---|---|---|
| A3 | Bílá | OUT |
| 5V | Červená | VCC |
| GND | Černá | GND |
Střední Senzor pro sledování čáry
| Hlavní deska | Vodič | Senzor |
|---|---|---|
| A6 | Bílá | OUT |
| 5V | Červená | VCC |
| GND | Černá | GND |
Pravý Senzor pro sledování čáry
| Hlavní deska | Vodič | Senzor |
|---|---|---|
| A7 | Bílá | OUT |
| 5V | Červená | VCC |
| GND | Černá | GND |
Levý Nárazník
| Hlavní deska | Vodič | Nárazník |
|---|---|---|
| 3 | Bílá | OUT |
| POW | Červená | 5V |
| GND | Černá | GND |
Pravý Nárazník
| Hlavní deska | Vodič | Nárazník |
|---|---|---|
| 11 | Bílá | OUT |
| POW | Červená | 5V |
| GND | Černá | GND |
Levý Motor:
| Hlavní deska | Motor |
|---|---|
| Červená | RED |
| Černá | BLACK |
Pravý Motor:
| Hlavní deska | Motor |
|---|---|
| Červená | BLACK |
| Černá | RED |
Pozor! U pravého motoru je zapojení opravdu obrácené, než u levého!
Levá Hallova sonda:
| Hlavní deska | Vodiče | Sonda |
|---|---|---|
| A2 | Bílá | OUT |
| POW | Červená | 5V |
| GND | Černá | GND |
Pravá Hallova sonda
| Hlavní deska | Vodiče | Sonda |
|---|---|---|
| 10 | Bílá | OUT |
| POW | Červená | 5V |
| GND | Černá | GND |
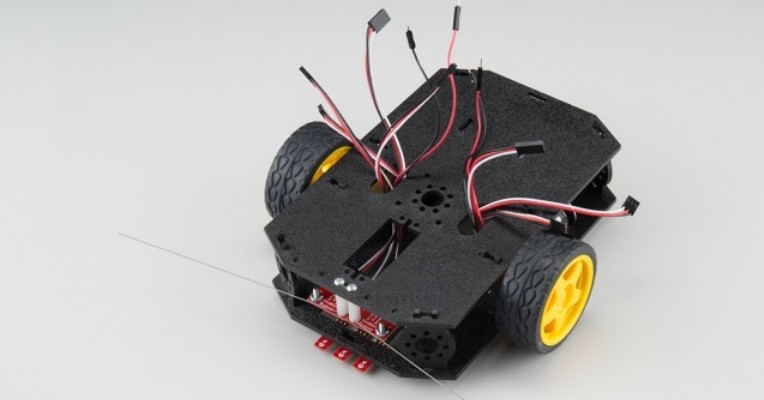
Zapojení by tedy mělo vypadat následovně:
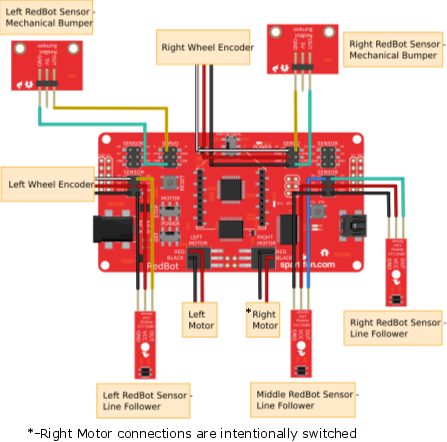
Obrázky pocházejí z anglického návodu od společnosti SparkFun (pod CC BY-NC-SA 3.0).
Bastlení zdar! A těšte se na další pokračování seriálu o RedBotovi.
V příštím článku už si ukážeme, jak na Arduino RedBot programování.

- Programovatelný kytarový pedál s Arduinem - 26.2.2020
- Arduino infračervený teploměr vytištěný na 3D tiskárně - 11.2.2020
- Jak je to s IP, MAC adresami a sítěmi - 18.12.2019
One Comment on “Arduino robot RedBot #2: Sestavení”
Napsat komentář
Pro přidávání komentářů se musíte nejdříve přihlásit.
Jiří Klasna
2.10.2015 at 20:09Hezké velmi pěkné,ale pro skoro důchodce drahé, ale podnětné.ten motůrek s převodovkou je pěkný, ještě kdyby vydržel vyšší teplotu a prach.